We present a boundary-aware domain adaptation model for LiDAR scan full-scene semantic segmentation (LiDARNet). Our model can extract both the domain private features and the domain shared features with a two branch structure. We embedded Gated-SCNN into the segmentor component of LiDARNet to learn boundary information while learning to predict full-scene semantic segmentation labels. Moreover, we further reduce the domain gap by inducing the model to learn a mapping between two domains using the domain shared and private features. Besides, we introduce a new dataset (SemanticUSL). The dataset has the same data format and ontology as SemanticKITTI. We conducted experiments on real-world datasets SemanticKITTI, SemanticPOSS, and SemanticUSL, which have differences in channel distributions, reflectivity distributions, diversity of scenes, and sensors setup. Using our approach, we can get a single projection-based LiDAR full-scene semantic segmentation model working on both domains. Our model can keep almost the same performance on the source domain after adaptation and get an 8%-22% mIoU performance increase in the target domain.
Updates:
The paper is released on arXiv
The Code will come soon
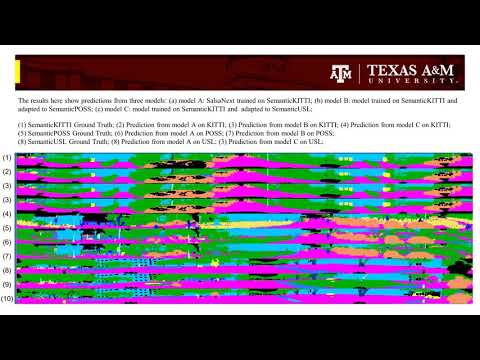
Experiment I: From SemanticKITTI to SemanticPOSS and SemanticUSL

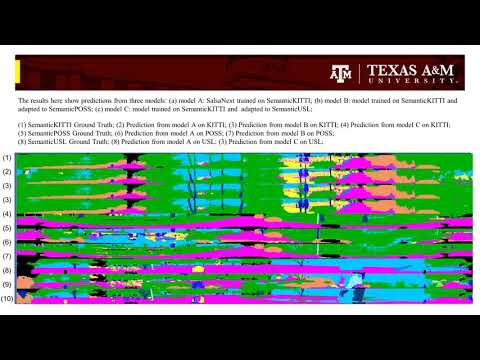
Experiment II: From SemanticPOSS to SemanticKITTI and SemanticUSL

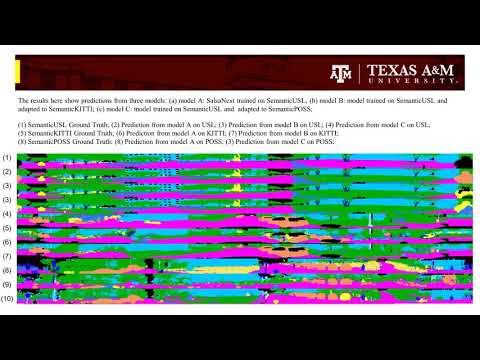
Experiment III: From SemanticUSL to SemanticPOSS and SemanticKTTI

@misc{jiang2021lidarnet,
title={LiDARNet: A Boundary-Aware Domain Adaptation Model for Point Cloud Semantic Segmentation},
author={Peng Jiang and Srikanth Saripalli},
year={2021},
eprint={2003.01174},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
SemanticUSL: A Dataset for Semantic Segmentation Domain Adatpation