A robot soccer game simulation environment based on CoppeliaSim.
I tested on the below environment.
- Ubuntu 20.04
- Python 3.8
- PyTorch 1.11.0
-
CoppeliaSim
Refer to
InstallationandBuildpart of robomaster_sim. CoppeliaSim Edu 4.4.0 is recommended. -
Python Packages
A virtual environment
venvis recommended ( Anaconda is not recommended).-
RoboMaster: Refer to Robomaster SDK.
-
Gym:
pip install gym[all]
-
PyTorch: >=1.11
-
(optional) stable baselines 3:
pip install stable-baselines3[extra]
-
- Start CoppeliaSim in your folder
./CoppeliaSim_Edu_V4_4_0_rev0_Ubuntu20_04/coppeliasim.sh-
Open simulation scene
1_EP_Shot.ttt.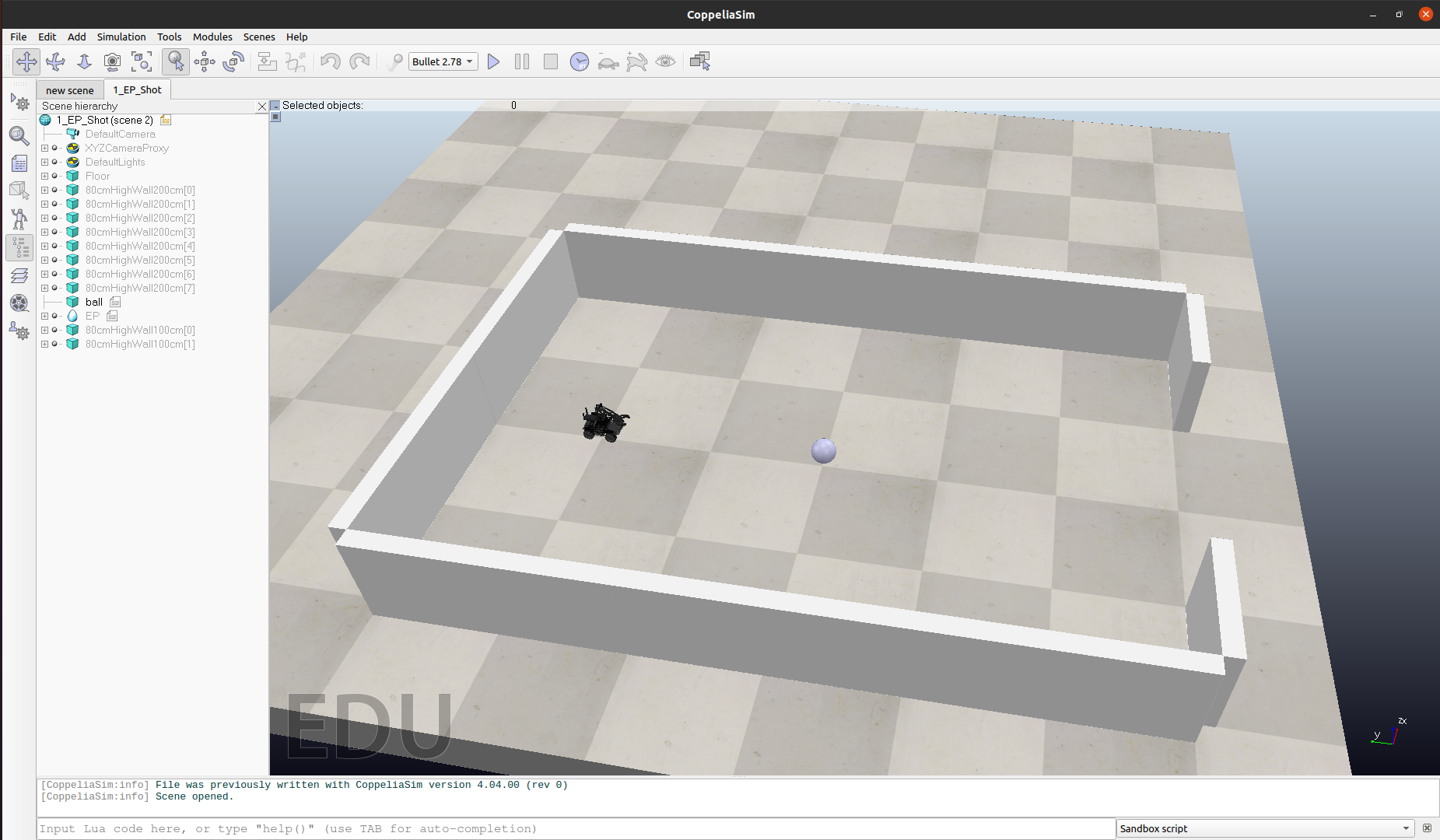
-
IP alias

sudo ifconfig lo:0 127.0.1.1/8 up
sudo ifconfig lo:1 127.0.1.2/8 up
sudo ifconfig lo:2 127.0.1.3/8 up- Press PLAY in CoppeliaSim.
- Try this to test if everything in CoppeliaSim is fine.
simRobomaster.set_target_twist(0, {x=0.2, y=-0.1, theta=0.1})
simRobomaster.move_arm(0, 1, 1, true)
simRobomaster.open_gripper(int robot_handle, bool wait=true)
simRobomaster.close_gripper(int robot_handle, bool wait=true)
simRobomaster.set_gripper_target(int handle, string state, float power=0.5)- Run the python script
simpleTest.pyinCoppeliaSimfolder to test if everything is fine.
Just run test.py in GymEnv to test.
Some commonly used functions are in CoppeliaSim Legacy remote API.pdf.
https://robomaster-dev.readthedocs.io/zh_CN/latest/index.html