Archive Note: I will no longer sutdy and work in Robitics. Please fork and develop on your needs.
简体中文 | English
Developed from @syuntoku14/fusion2urdf.
A Fusion 360 script to export urdf files. This is a PyBullet adpative version.
Note: Only support "Revolute", "Rigid" and "Slider" joint currently. Also I don't have plans to work on rigid group and other types of joints.
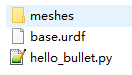
This exports:
- .urdf files of the model
- .stl files of your model
- A example hello.py to load your model into PyBullet.
03/03/2021: Pull the fix for xyz calculation from 01/09/2021 commit d2e754086f092ac81c481a0c3862e3cecb1f4dfe in syuntoku14/fusion2urdf
- If you see that your components move arround the map center in rviz try this update
- More Infos see this link
03/27/2020 update2: Add a supplementary script Joint2Graphviz to check assembled structures.
03/27/2020 update: Add "Do not Capture Design History" to fix InternalValidationError. See Developer Notes
03/25/2020: Supporting exportation of nested components.
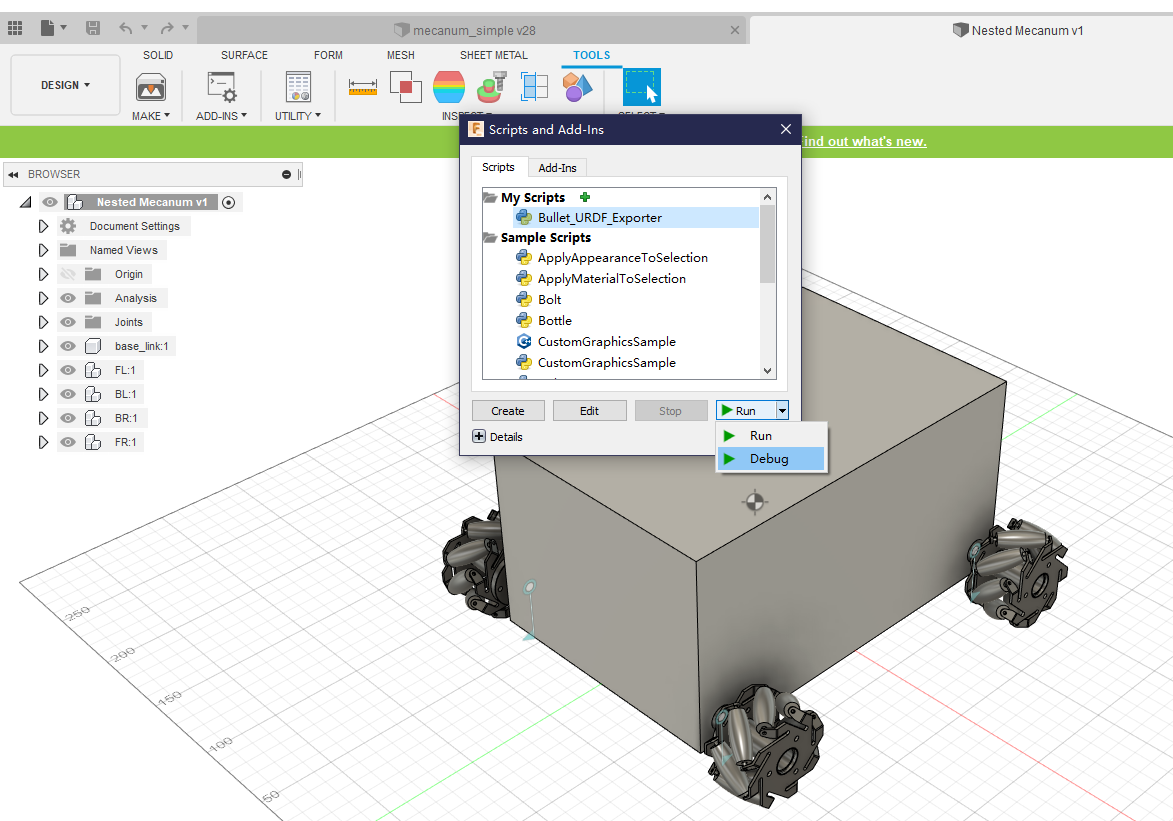
Add this script into Fusion 360 via Tools -> Add-Ins


- Some other notes for getting avoid of warnings:
- Change language preference to English
- Rename any full-width symbol to half-width symbol (like
。and())
- Set up
base_link - Suggestion: Use Joint2Graphviz to check your assembled structure!
- Check if your default unit is mm or not. If you set it to some other unit, you need to manually adjust the scale when exporting the stl fils. See FAQ
- Set up the components properly
-
Unit should be mm (See FAQ if it's not)
-
A base_link
-
Your file should not conatin extra file link. If any, right click on the component, do 'Break Link'
- File links will be generated when you do something like 'Insert into current design'
- So please make sure you did had a backup when you do the 'Break link' operations.
-
Check component and joint names (Set English as the language if necessary)
-
IMPORTANT! Set up joints properly
-
Supplementary script: Joint2Graphviz will generate a txt file capable for Graphviz. Copy the content to WebGraphviz to check the graph. Usually a correct model should be a DAG with 'base_link' as the only root.
-
In fusion, when you hit 'J' to assemble joints, note that the exporter consider component 1 as 'child' and component 2 as 'parent'. For example, when you want to assemble a 4-wheel car with middle cuboid as
base_link, you should assemble the vehicle with wheel as component 1 and 'base_link' as component 2. -
For example, you should be assemble your model to make result of
check_urdf simple_car.urdflike the following. i.e. BL, BR, FL, FR as component 1 and base_link as component 2 when you assemble these 4 joints.
robot name is: simple_car ---------- Successfully Parsed XML --------------- root Link: base_link has 4 child(ren) child(1): BL_1 child(2): BR_1 child(3): FL_1 child(4): FR_1 -
-
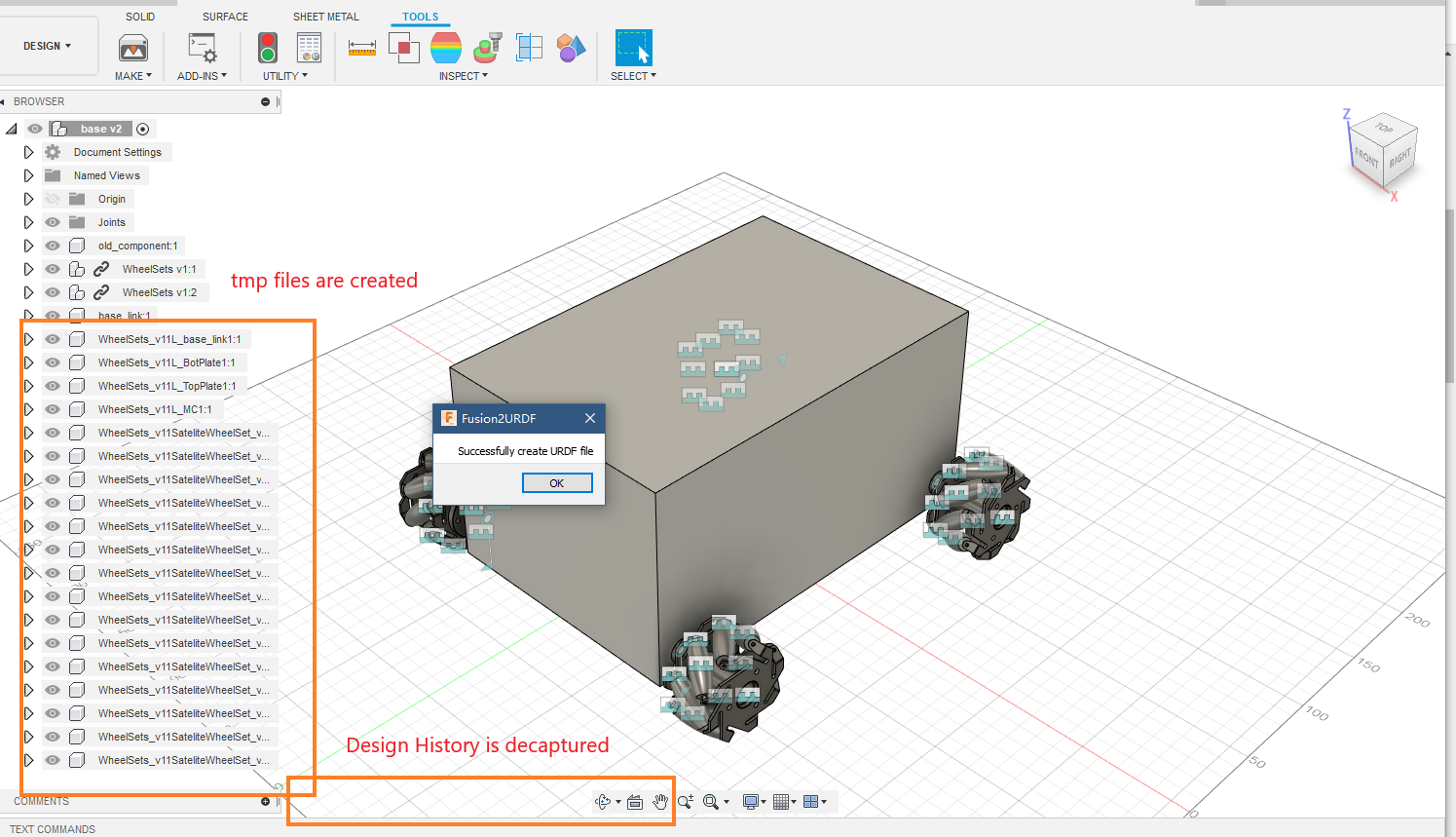
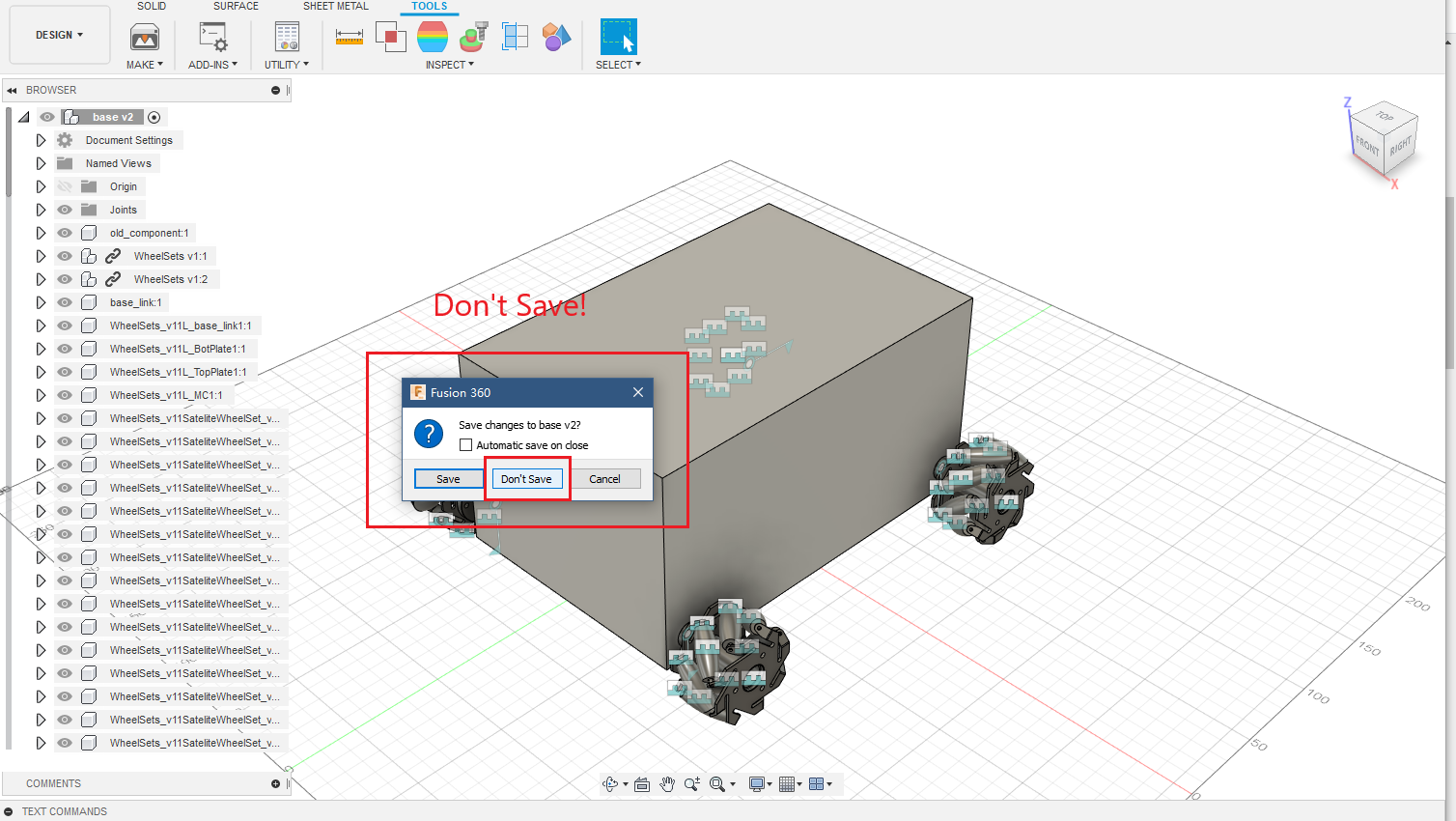
Run the script and select storing location
- Note: Don't save your file after running the scripts! DesignType will be set to "Direct Mode" and some temporary components will be created. That's not the changes you want!
-
Enjoy from
python hello_bullet.py!



- Bugs are usually caused by wrongly set up joints relationships
- Nest-component support might also lead to undocumented bugs. So remove the nesting structure helps a lot.
Since the script still cannot showing warnings and errors elegantly, if you cannot figure out what went wrong with the model while bugs are usually caused by wrongly set up joints relationships, you can do the following things:
- Make sure every joints are set up correct (parent and child relationship). If failed --->
- Re-tidy your design to make it not include any nest-components. Use this script. If failed --->
- Try the stable version Branch: stable.
- Run with debug mode and check what happens

A supporting script here: Joint2Graphviz for details
You have to modify Bullet_URDF_Exporter/core/Link.py. Search scale
(Please ping me if you find any other place that should also be modified)
# visual
visual = SubElement(link, 'visual')
origin_v = SubElement(visual, 'origin')
origin_v.attrib = {'xyz':' '.join([str(_) for _ in self.xyz]), 'rpy':'0 0 0'}
geometry_v = SubElement(visual, 'geometry')
mesh_v = SubElement(geometry_v, 'mesh')
mesh_v.attrib = {'filename': self.repo + self.name + '.stl','scale':'0.001 0.001 0.001'} ## scale = 0.001 means mm to m. Modify it according if using another unit
material = SubElement(visual, 'material')
material.attrib = {'name':'silver'}
# collision
collision = SubElement(link, 'collision')
origin_c = SubElement(collision, 'origin')
origin_c.attrib = {'xyz':' '.join([str(_) for _ in self.xyz]), 'rpy':'0 0 0'}
geometry_c = SubElement(collision, 'geometry')
mesh_c = SubElement(geometry_c, 'mesh')
mesh_c.attrib = {'filename': self.repo + self.name + '.stl','scale':'0.001 0.001 0.001'} ## scale = 0.001 means mm to m. Modify it according if using another unit
material = SubElement(visual, 'material')