说明:模型适配陈君【chenjunnn】的整车状态最优估计器自瞄的电控部分
如果感觉对你有帮助的话,不要吝啬你的小星星 哦
哦
给定目标位置坐标(x,y,z),求解出射角θ(炮台仰角)
本文基本约定:
- 右手坐标系
-
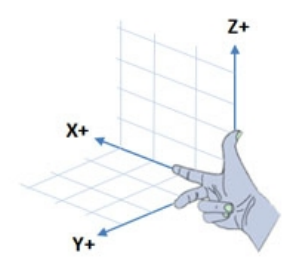
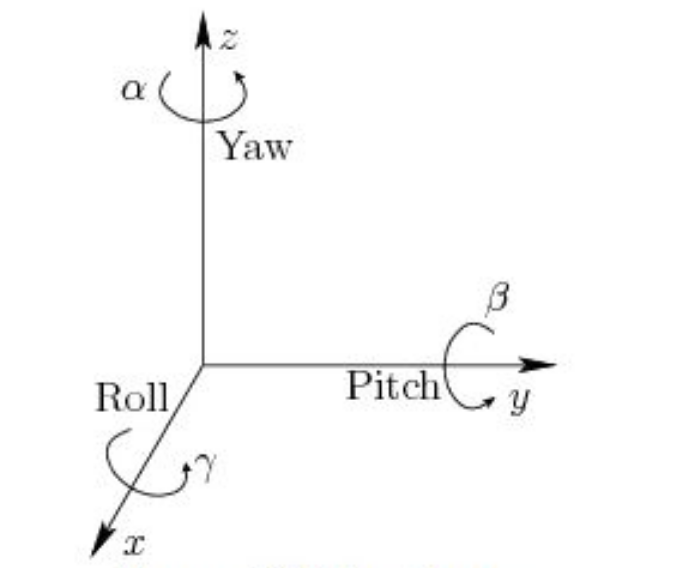
- pitch轴 y轴为转轴 从y轴正向看向原点,逆时针方向为pitch轴正方向
- yaw轴 z轴为转轴 从z轴正向看向原点,逆时针方向为pitch轴正方向
-
- 某弹道竖直方向切面
$$s = \sqrt{x^2+y^2}$$ , z为纵轴


只考虑重力作用,弹道为抛物线


当我们直接瞄准目标点(枪管朝向目标点)时,会有一个下落高度。
我们将利用这个下落高度进行迭代补偿。
考虑到1v1近战,距离较近,枪管倾斜角度不会过大,因此只考虑竖直方向的重力和水平方向的空气阻力
设发射速度为 v0 倾斜角为 θ
竖直方向(z):
水平方向(s):
C为球体在空气中的摩擦系数 一般取值0.47
ρ为空气密度,在温度为0摄氏度、标准大气压下取值为1.293kg/m^3, 25摄氏度、标准大气压取值为1.169kg/m^3
S为接触面积
小弹丸参数:
质量 :3.2g±0.1g 尺寸 :16.8mm±0.2mm
实际值会偏大
迭代过程:
-
设置目标点targetPoint(x, y, z)
-
设置临时目标点tempPoint = targetPoint
-
循环迭代n次(10-20次):
- 计算仰角(pitch) angle = 枪管指向tempPoint的角度
- 利于单方向空气阻力模型,计算实际命中点realPoint
- 计算误差 deltaZ = targetPoint - realPoint
- 更新tempPoint = tempPoint + deltaZ
-
得到最终的angle和deltaZ
更新公式
目标落点z0
│ .gitignore
│ ECterminal.c 电控端文件
│ readme.md
│ SolveTrajectory.c 调试文件
│ SolveTrajectory.h 头文件
│
├─.vscode
│ settings.json
│ tasks.json
│
└─pic
| coordinate.jpg
| projectile.png
| projectile_model.png
| rotations.png
[1]RoboMaster 2019 AI Robot Platform RoboMaster/RoboRTS-Tutorial: RoboRTS Tutorial (github.com)
[3]chenjunnn/rm_auto_aim: RoboMaster 装甲板自动瞄准算法模块 (github.com)
[4]chenjunnn/rm_serial_driver: RoboMaster 视觉系统与电控系统的串口通讯模块 (github.com)