This Project is the seventh task (Project 2 of Term 2) of the Udacity Self-Driving Car Nanodegree program. The main goal of the project is to apply Unscented Kalman Filter to fuse data from LIDAR and Radar sensors of a self driving car using C++.
The project was created with the Udacity Starter Code.
scra directory with the project code:main.cpp- reads in data, calls a function to run the Kalman filter, calls a function to calculate RMSEukf.cpp- the UKF filter itself, defines the predict function, the update function for lidar, and the update function for radartools.cpp- a function to calculate RMSE
dataa directory with two input files, provided by Udacityresultsa directory with output files
- Input file: sample-laser-radar-measurement-data-1.txt
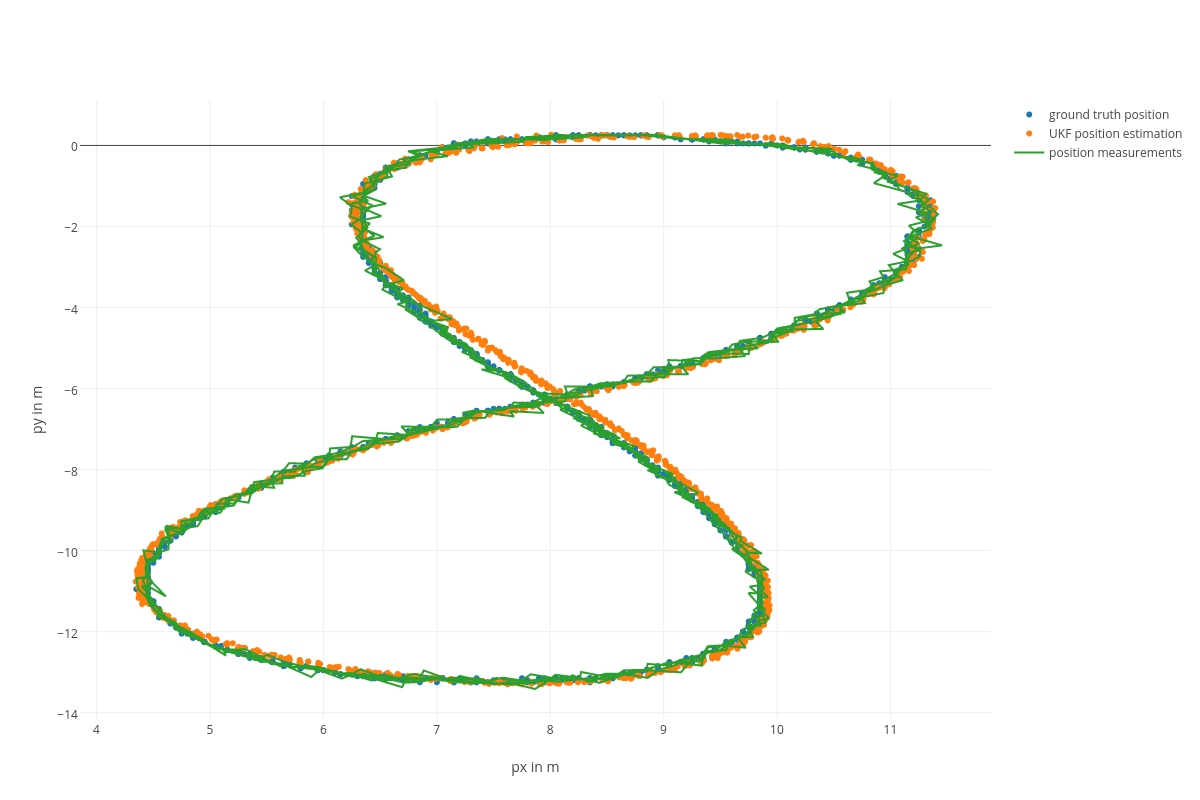

RMSE = [0.0758215, 0.0842188, 0.632344, 0.580668]
Threshold: RMSE <= [0.09, 0.09, 0.65, 0.65]
- Input file: sample-laser-radar-measurement-data-2.txt
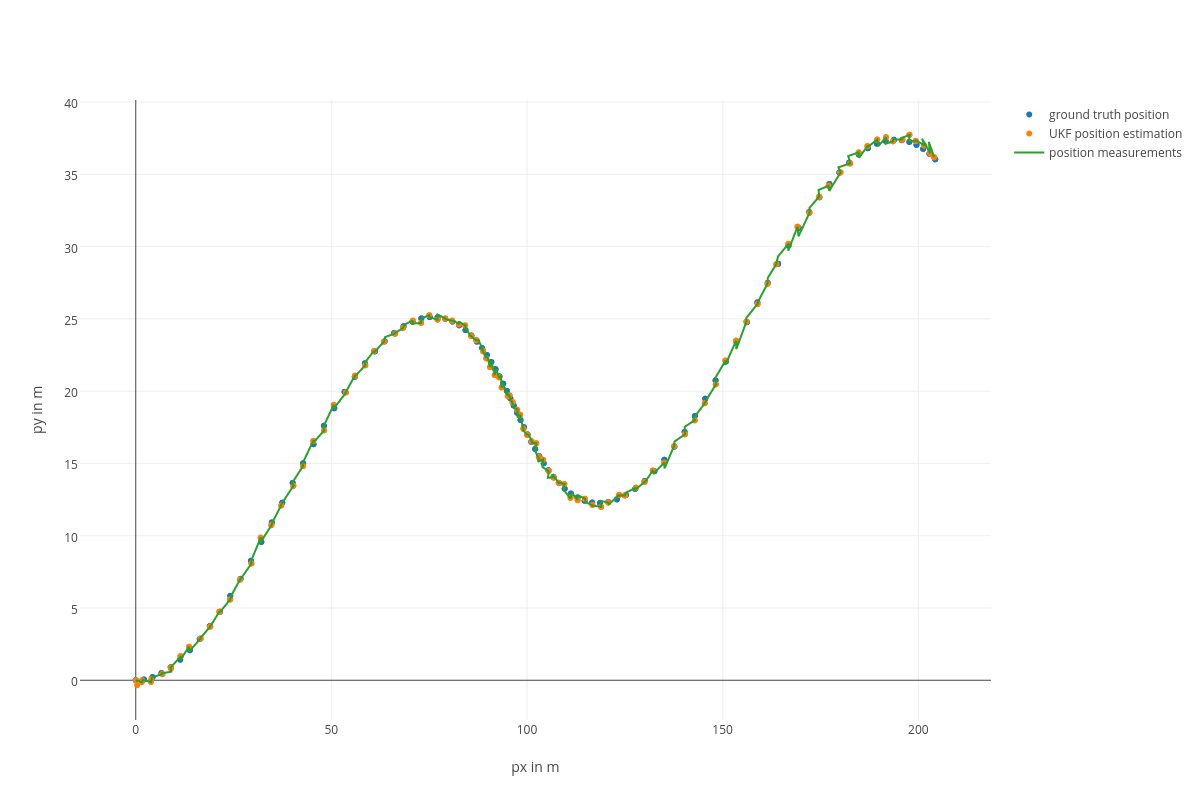

RMSE = [0.194559 0.189894 0.518945 0.507547]
Threshold: RMSE <= [0.20, 0.20, 0.55, 0.55]
- cmake >= v3.5
- make >= v4.1
- gcc/g++ >= v5.4
Clone this repo and perform
mkdir build && cd build
cmake .. && make
./ExtendedKF ../data/sample-laser-radar-measurement-data-1.txt output1.txt > input1.log
./ExtendedKF ../data/sample-laser-radar-measurement-data-2.txt output2.txt > input2.log