[Goal] We can apply various extracton and descriptor method for matching in challenging environment
[Advanced] Algorithm extended by applying the corresponding github page → Parallax
[Advantage] We can easily apply various method only changing parameters!!
[Without GPU Version] You can apply only traditional method (w/o GPU) version in other branch (called only_trad_method)
- Challenging Environment
Query Image Candidate Image 



-
OpenCV 3.2.0, OpenCV Contrib 3.2.0, C++ 11 version
-
Use LibTorch (1.6.0 version)
- [0] Just follow up this page !!
- [1] Find Cuda version and cuDNN version
- [2] Install appropriate version of Libtorch in local desktop
- Reference Site: https://pytorch.org/get-started/locally/
- [3] Add g++ in start.sh file
- Reference Site: https://discuss.pytorch.org/t/compile-libtorch-with-g/114536
- [4] Error Related
- (1) libc10.so: cannot open shared object file: No such file or directory
- (2) 'c10::Error' what(): open file failed because of errno 2 on fopen
-
Get Pre-trained Model (Thanks for freely using the pre-trained model !!)
-
Feature Extraction Method
- [1] ORB
- [2] goodFeaturesToTrack
- [3] SIFT
- [4] SuperPoint
-
Feature Descriptor Method
- [1] AKAZE
- [2] SURF
- [3] DAISY
- [4] SuperPoint
-
Macher Method
- [1] Brute-Force Matcher (BF)
- [2] Fast Library for Approximate Nearest Neighbors Matcher (FLANN)
-
Matching Method
- [1] vanilla match (VANILLA)
- [2] knn match (KNN)
- [3] radius match (RADIUS)
-
Outlier Rejection Method
- [1] findFundamentalMatrix (FM)
- [2] vector field consensus (VFC)
Clone the repository and build and run simultaneously:
$ cd ${workspace}
$ git clone https://github.com/SungJaeShin/Feature_matching.git
$ cd Feature_matching
$ sh start.sh
-
IMAGE_NUM (include.h): Put value to test image pair
-
EXTRACT_MODE (include.h):
- 1 → apply ORB
- 2 → apply GFTT (GoodFeaturesToTrack)
- 3 → apply SIFT
- 4 → apply GFTT(Query) + ORB(Candidate)
- 5 → apply GFTT(Query) + SIFT(Candidate)
- 6 → apply SuperPoint
-
DESCRIPTOR_MODE (include.h):
- 1 → apply AKAZE
- 2 → apply SURF
- 3 → apply DAISY
- 4 → apply SuperPoint
-
MATCHER_MODE (include.h):
- 1 → apply BF Matcher (Brute-Force)
- 2 → apply FLANN Matcher (Fast Library for Approximate Nearest Neighbors)
-
MATCHING_MODE (include.h):
- 1 → apply vanilla match
- 2 → apply knn match
- 3 → apply radius match
-
REJECTION_MODE (include.h):
- 1 → apply fundamentalMatrix
- 2 → apply VFC
-
MIN_DIS (include.h): Put value to change feature's Euclidean distance when using GoodFeaturesToTrack extractor
-
superpoint_model_weight_path (matching.cpp): Put absolute path for getting pre-trained SuperPoint model
-
query_path, cand_path (matching.cpp): Put absolute path for getting query image and candidate image
-
save_path (plot.h): Put absolute path for saving matching result
This variables are not requirement, but the following variables are also considered to obtain more robust results.
-
[CASE 1] When you use BFMatcher, please change in create arguments
- SIFT, SURF → cv::NORM_L1 & cv::NORM_L2
- ORB → cv::NORM_HAMMING
-
[CASE 2] When you use radiusMatch, please change maxDistance argument
- In above case, there are some preference radius results !! (Default = 0.3)
- [Preference radius] 0.4 => 405 matches / 0.3 => 183 matches / 0.2 => 117 matches
- In above case, there are some preference radius results !! (Default = 0.3)
-
[CASE 3] When you use findFundamentalMat, please change ransacReprojThreshold argument (Default = 1)
- If you want to get more robust result, then change '0.1' or etc.
-
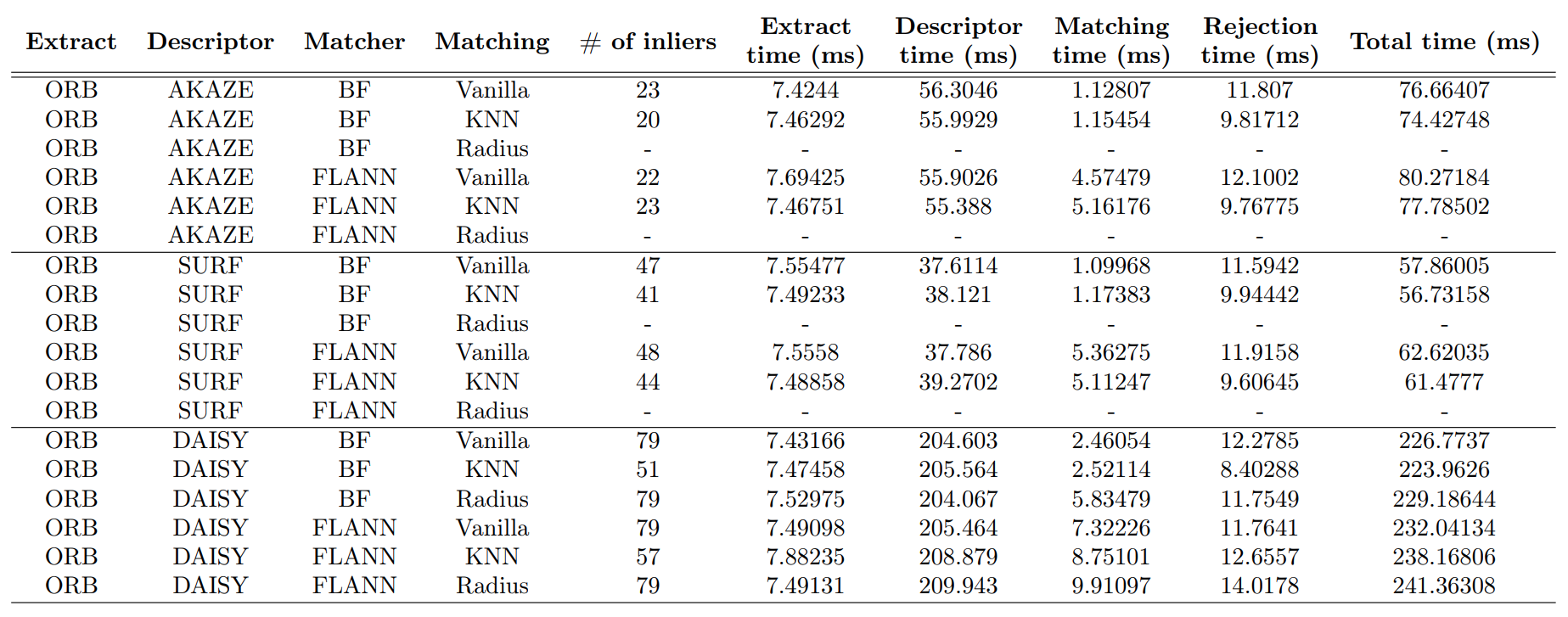
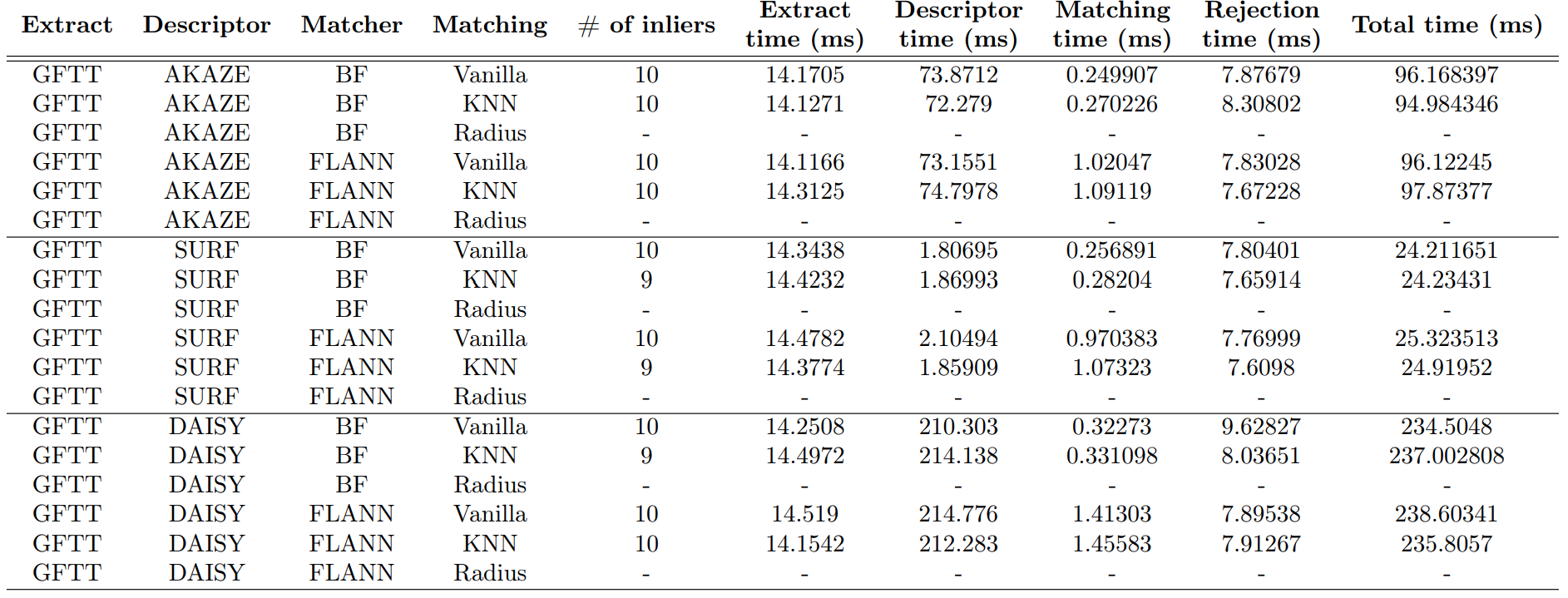
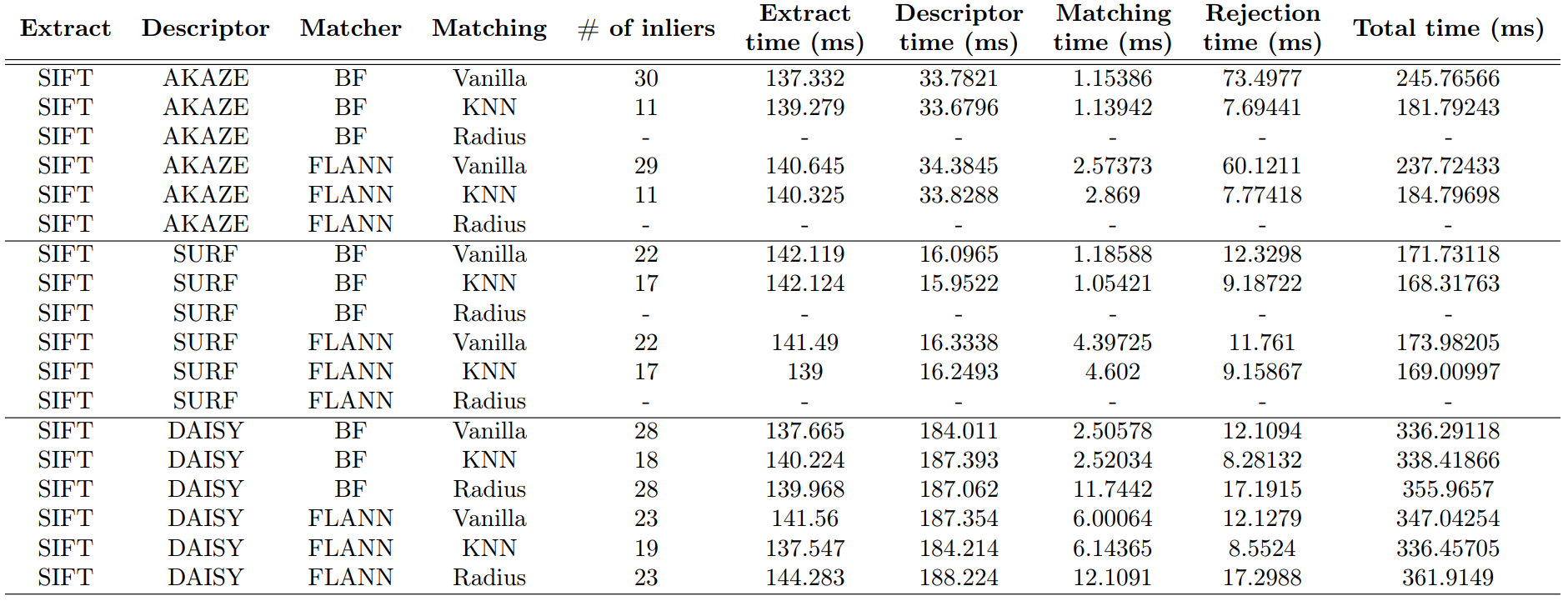
Results of Inlier Number and Time Consumption
-
ORB Result
-
GFTT Result
-
SIFT Result
-
-
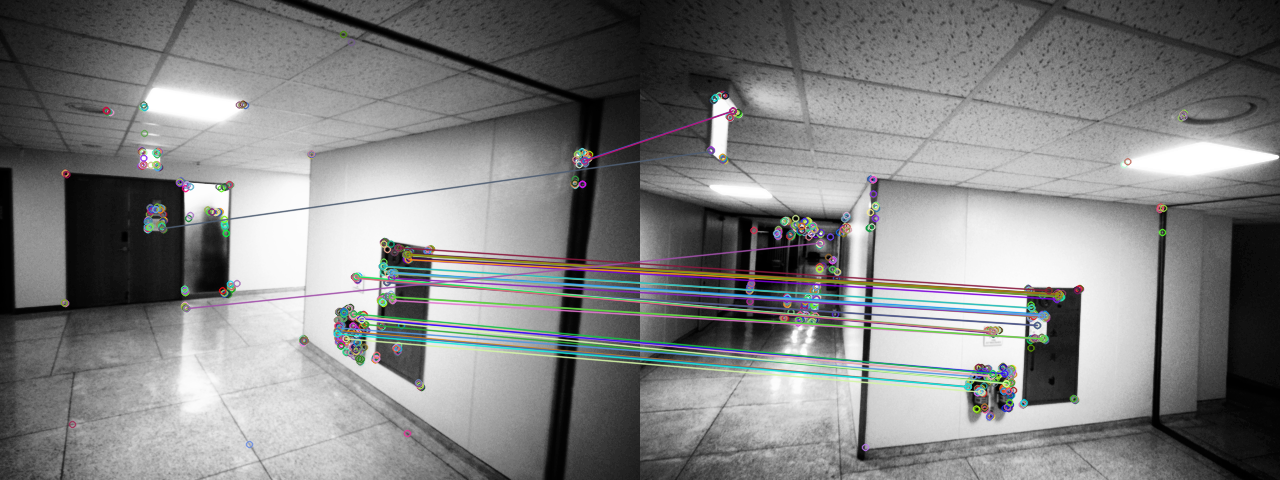
Matching Results Set
ORB + AKAZE + FM (inliers 22) ORB + SURF + FM (inliers 44) ORB + DAISY + FM (inliers 57) 
GFTT + AKAZE + FM (inliers 10) GFTT + SURF + FM (inliers 9) GFTT + DAISY + FM (inliers 10) 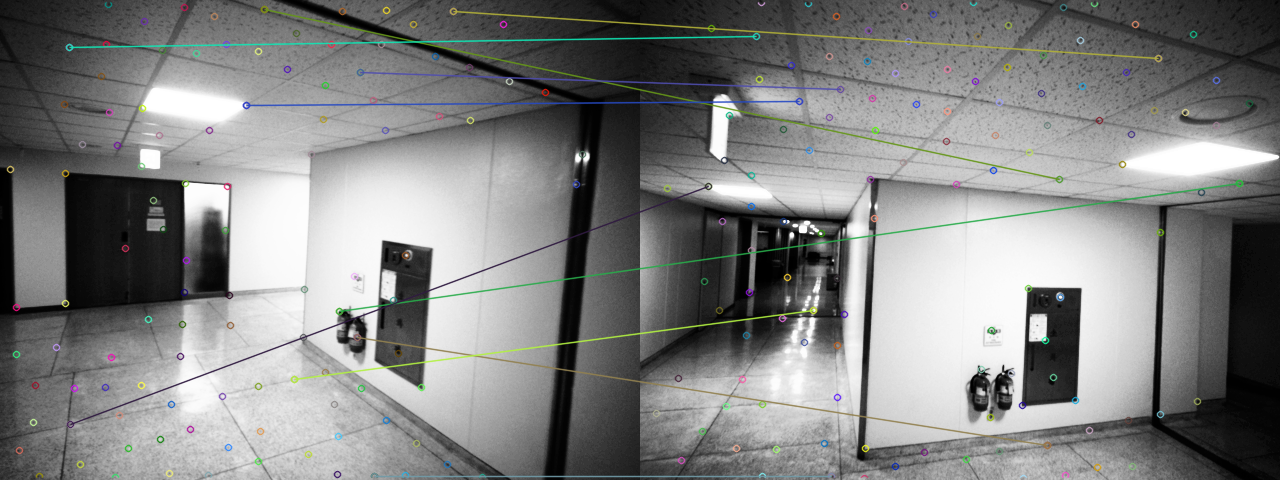
SIFT + AKAZE + FM (inliers 11) SIFT + SURF + FM (inliers 17) SIFT + DAISY + FM (inliers 19) 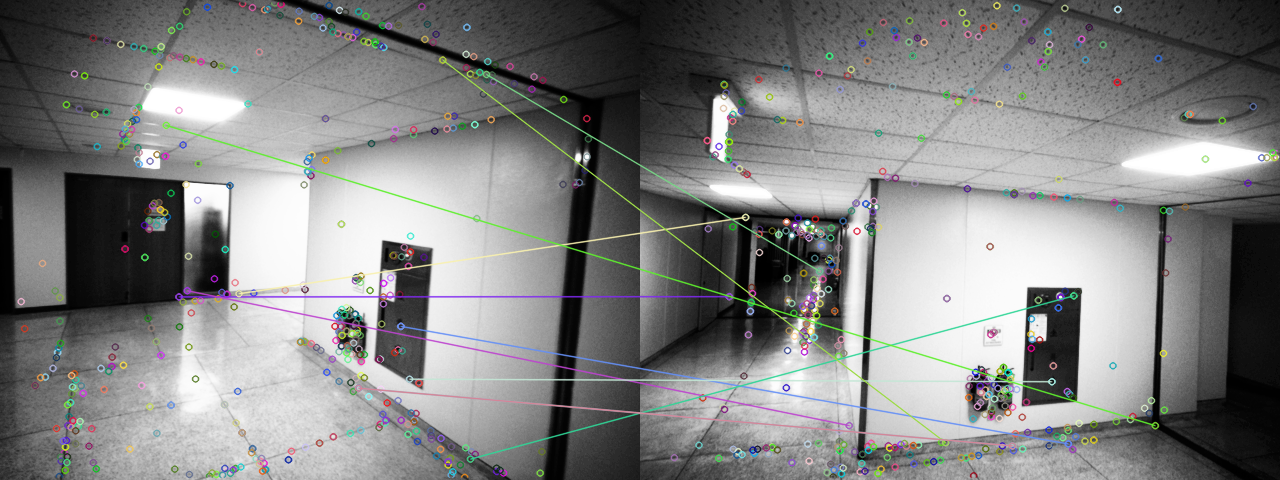


GFTT + ORB + AKAZE + FM (inliers 10) GFTT + ORB + SURF + FM (inliers 10) GFTT + ORB + DAISY + FM (inliers 8) 

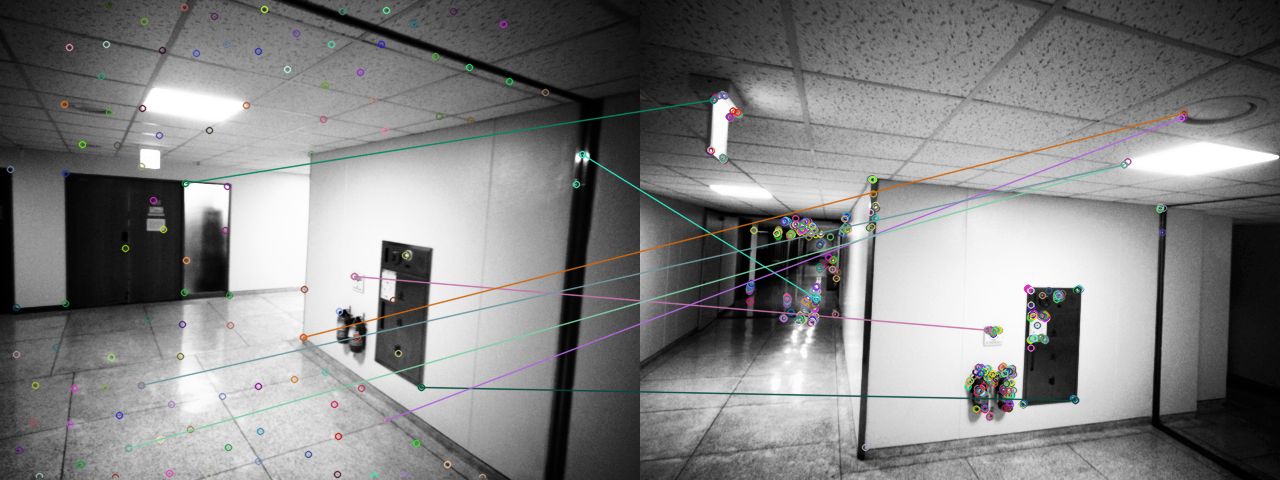
GFTT + SIFT + AKAZE + FM (inliers 10) GFTT + SIFT + SURF + FM (inliers 9) GFTT + SIFT + DAISY + FM (inliers 9) 


-
SuperPoint Result (C++ Version)
- Time consumption getting Pre-trained SuperPoint model: 21.1761 ms
- Result of features using SuperPoint Model
Query Features Candidate Features 

-
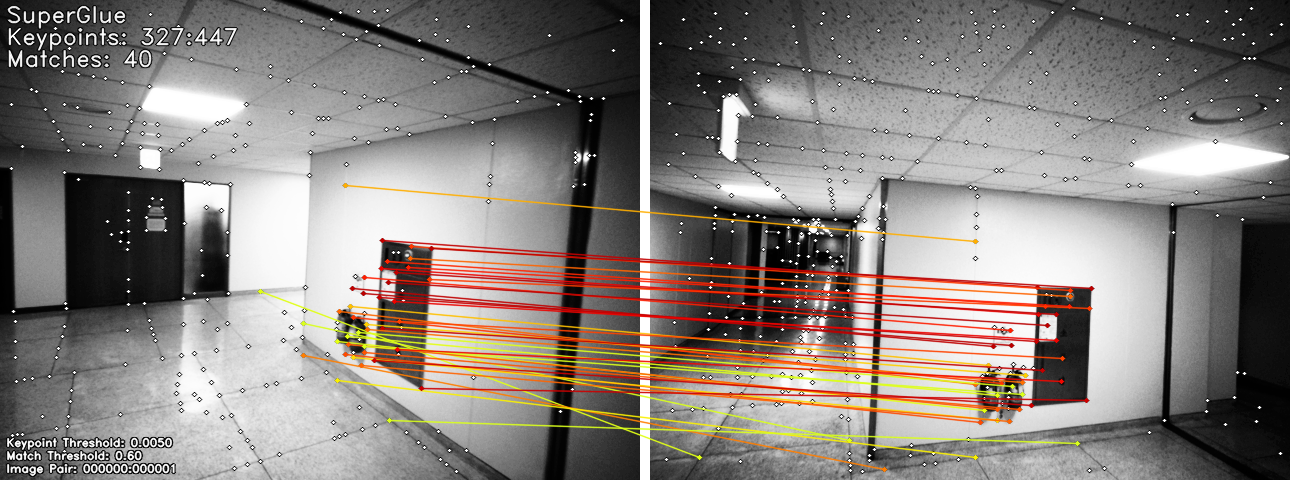
SuperPoint + SuperGlue Result (Python Version) (Follow this Page !!)
- Red: more confident, Blue: less confident
Threshold = 0.3 (inliers 64) Threshold = 0.4 (inliers 52) 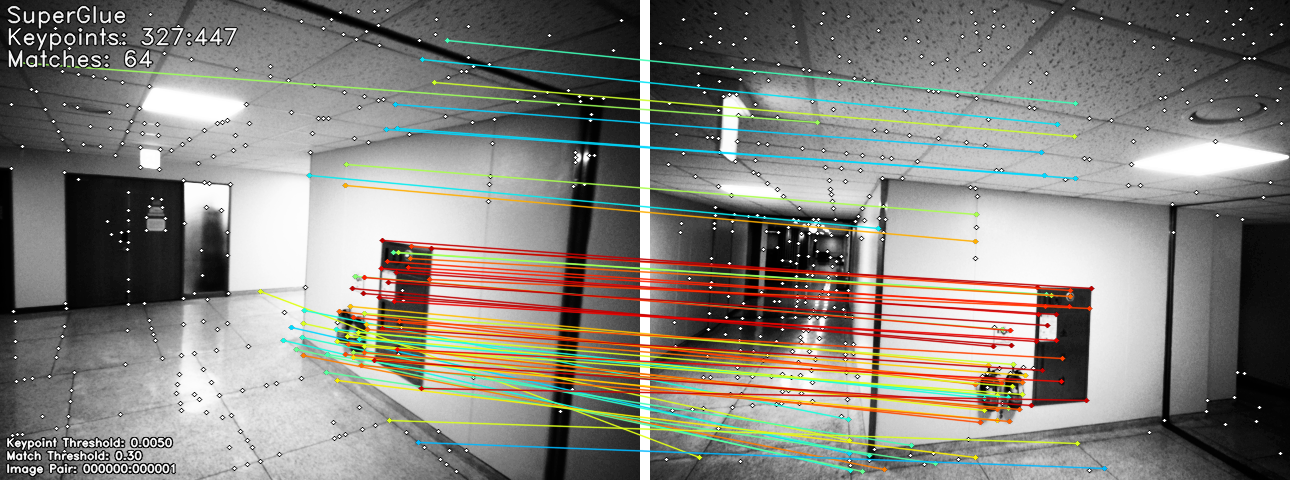
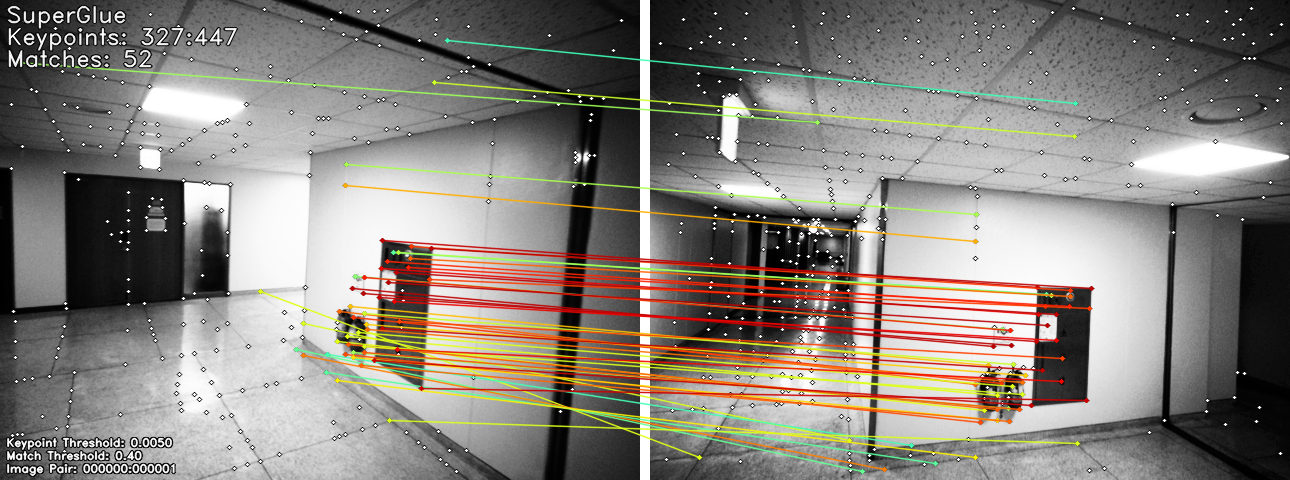
Threshold = 0.5 (inliers 47) Threshold = 0.6 (inliers 40) 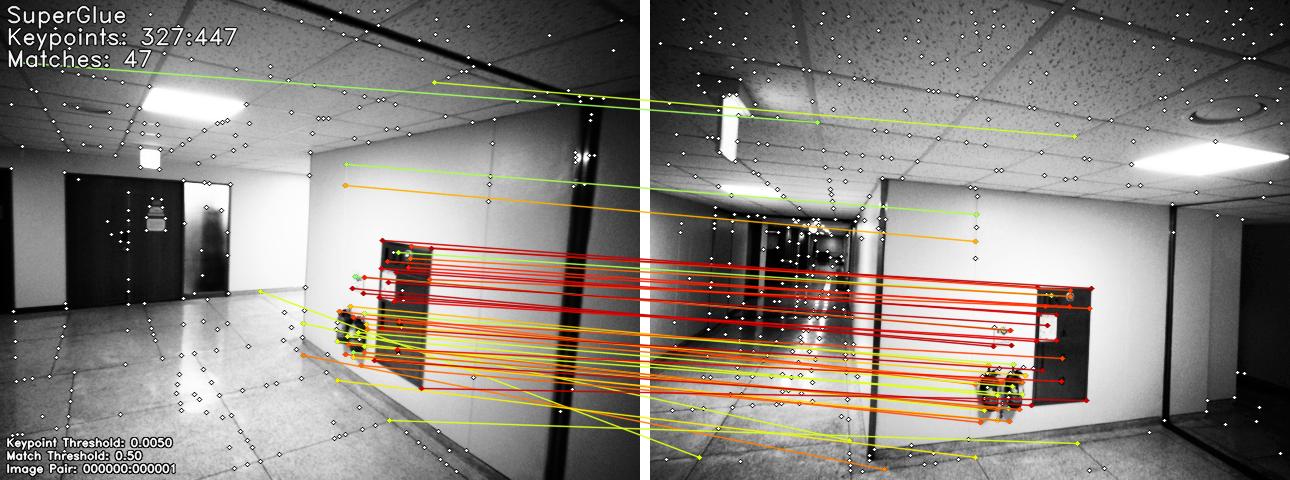
Threshold = 0.7 (inliers 30) Threshold = 0.8 (inliers 25) 



























-
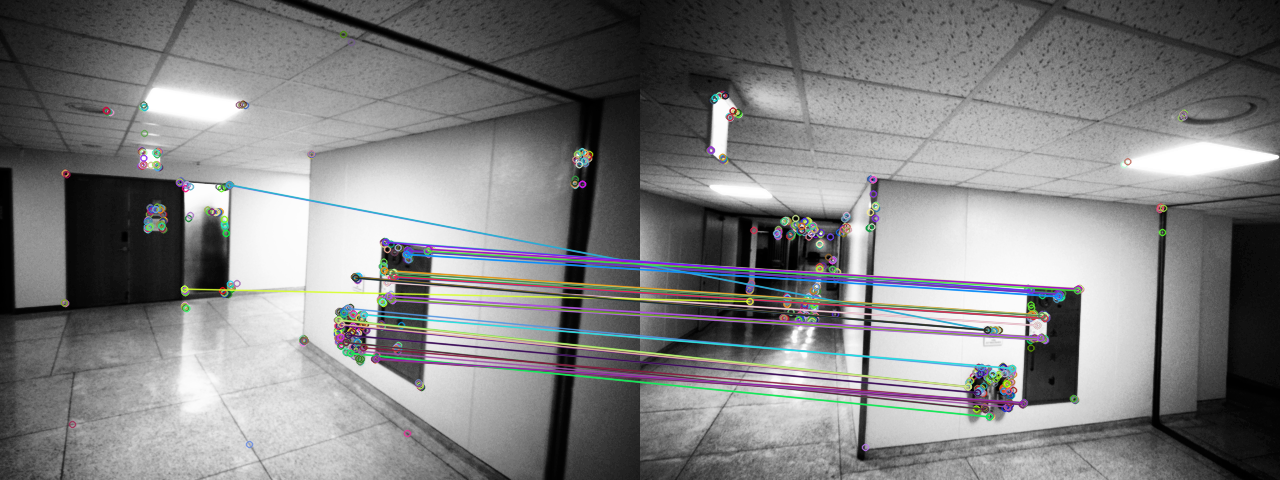
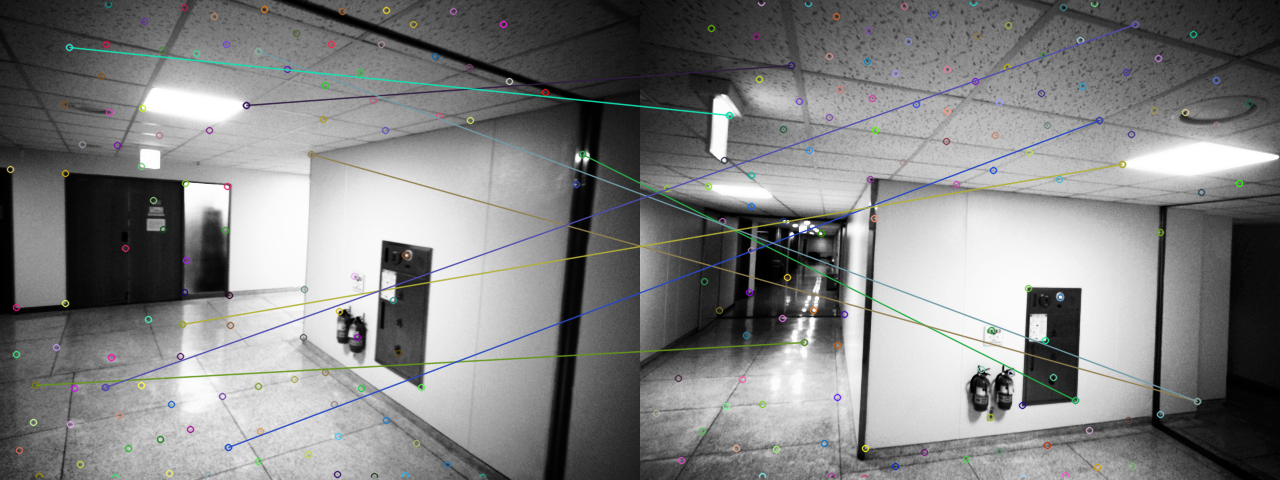
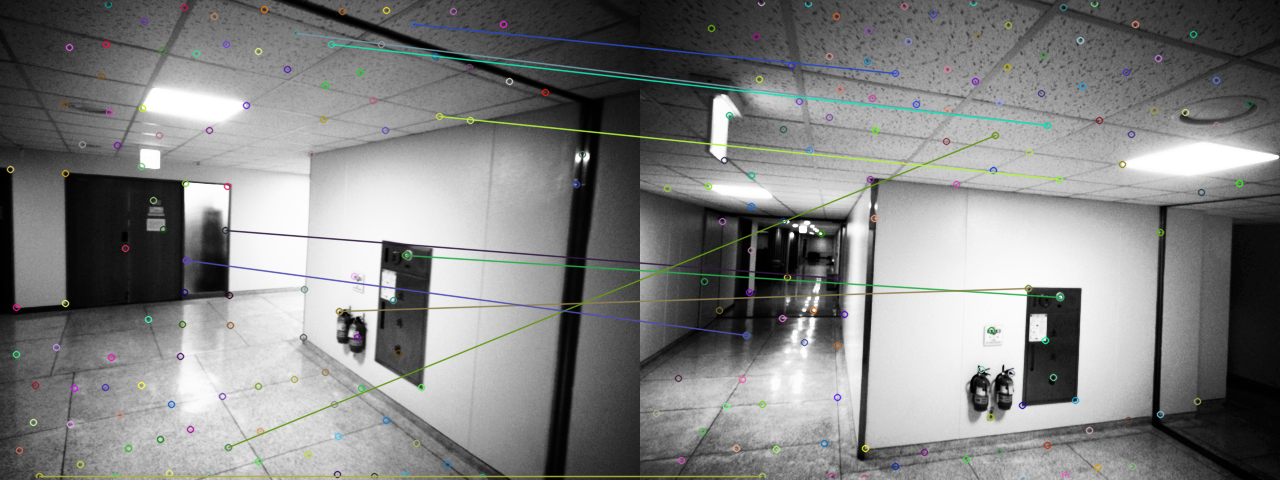
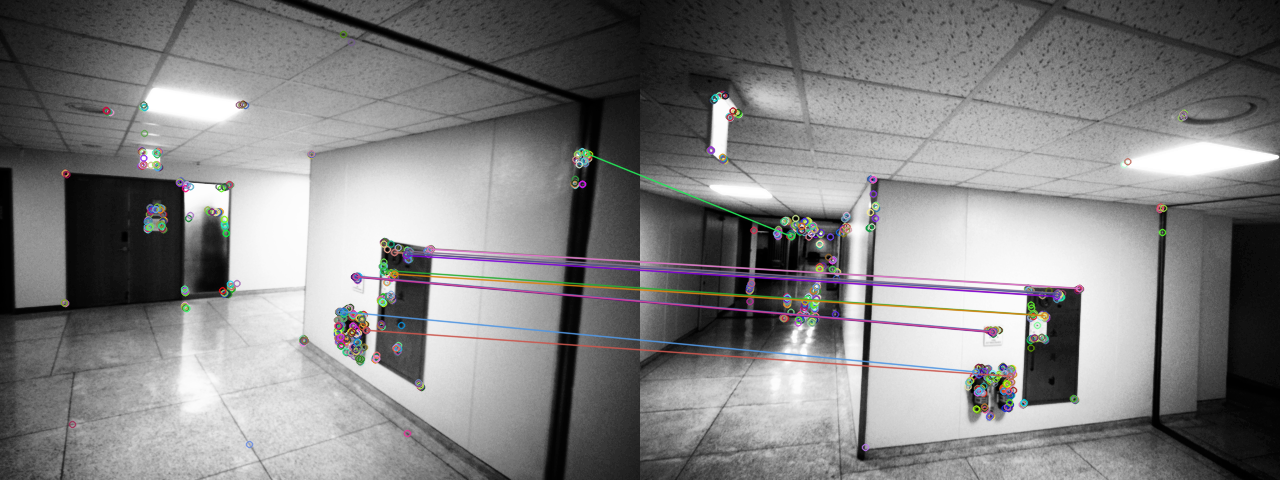
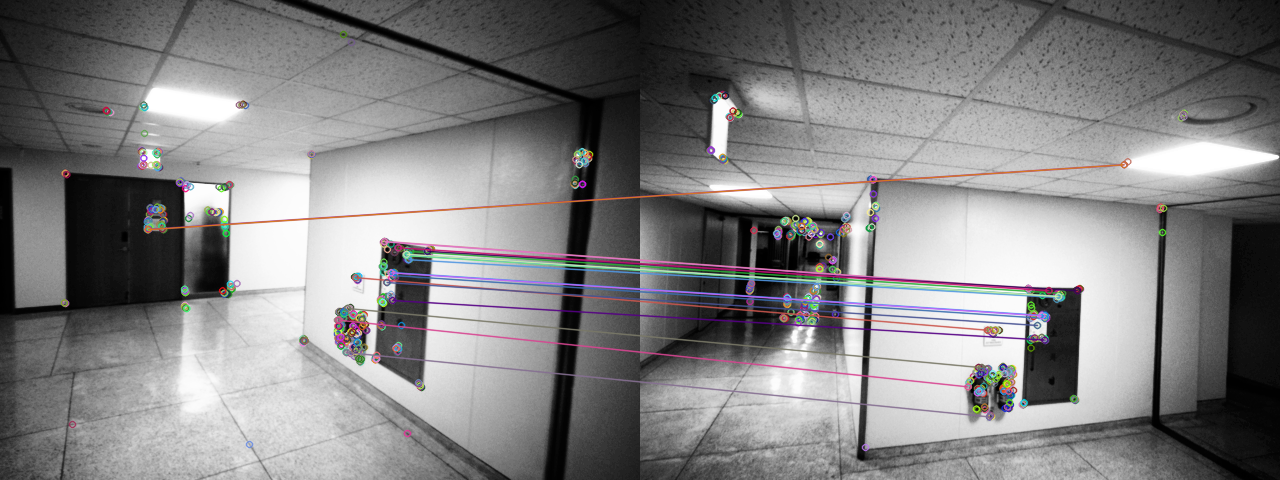
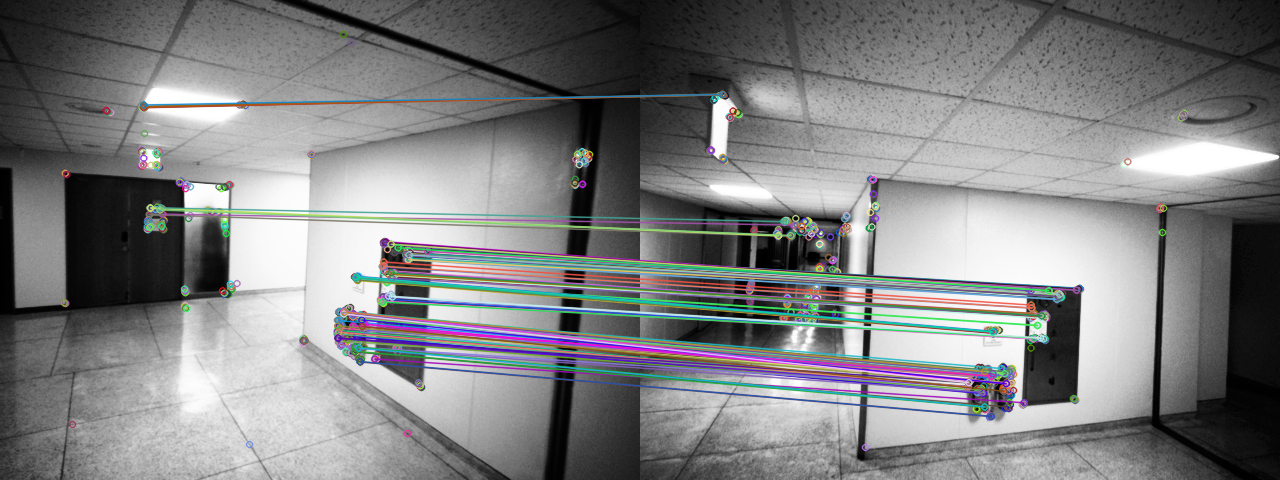
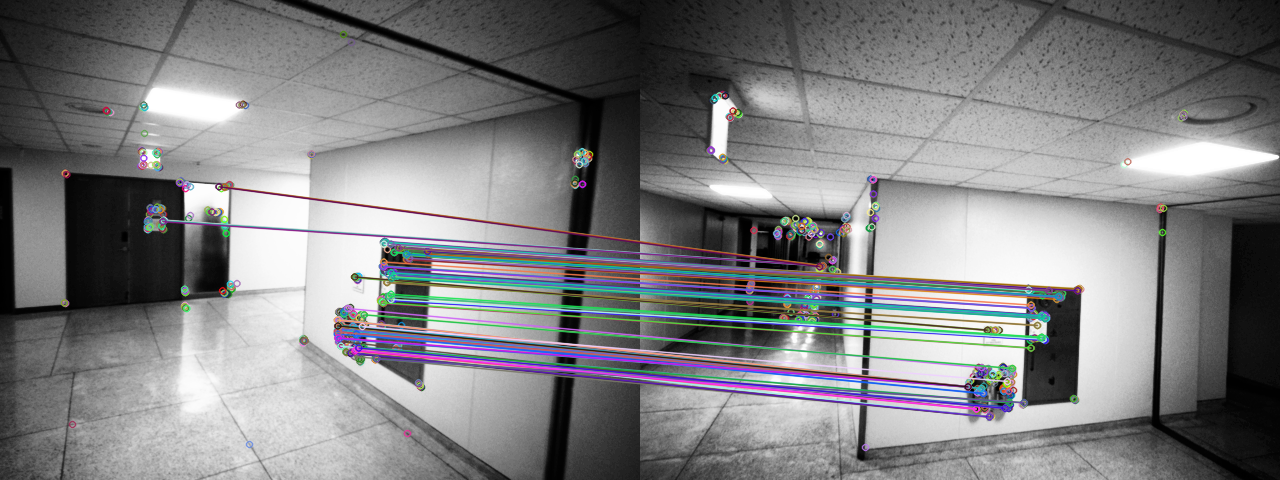
C++ Results
-
ORB + SURF + BF + KNN + FM (ransacReprojThreshold = 1)
-
ORB + DAISY + BF + KNN + FM (ransacReprojThreshold = 1)
-
ORB + SURF + BF + KNN + FM (ransacReprojThreshold = 0.1)
-
ORB + DAISY + BF + KNN + FM (ransacReprojThreshold = 0.1)
-
ORB + SURF + BF + KNN + VFC
-
ORB + DAISY + BF + KNN + VFC
-
-
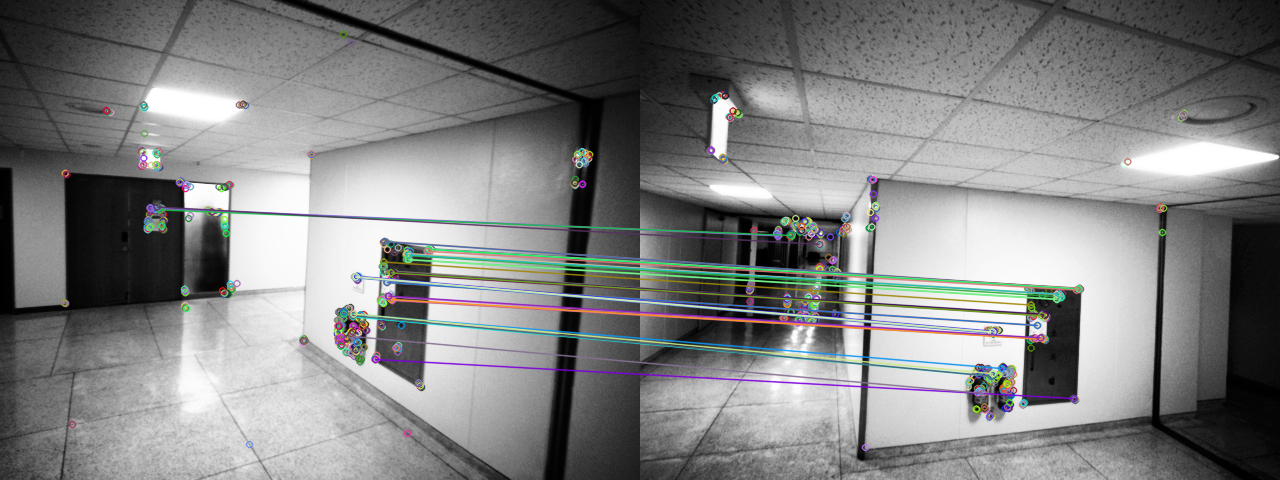
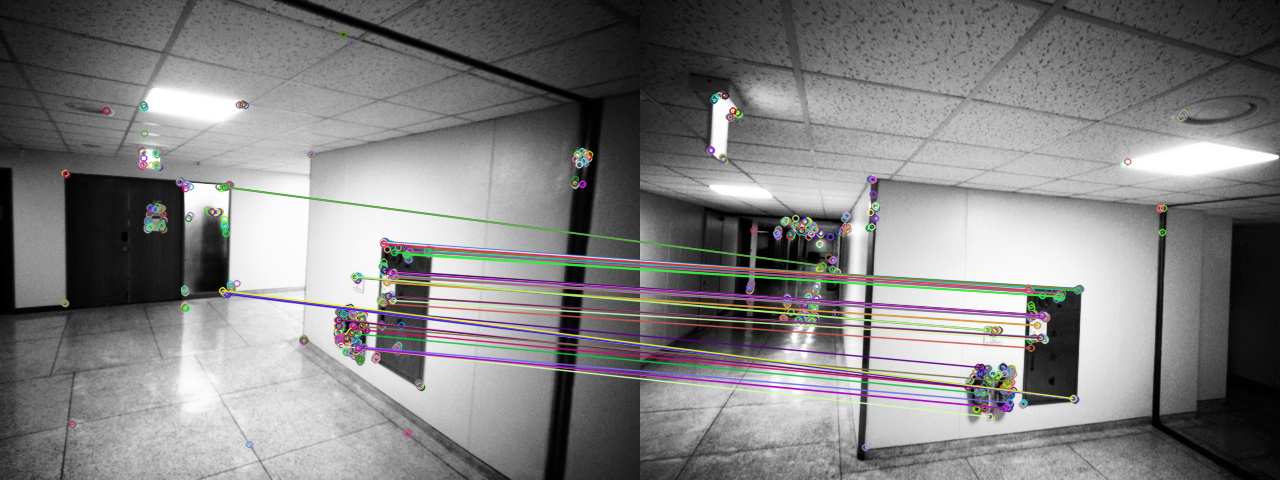
Python Version (Follow this Page !!)
- SuperPoint + SuperGlue (matching threshold = 0.8) (Red: more confident, Blue: less confident)
- SuperPoint + SuperGlue (matching threshold = 0.8) (Red: more confident, Blue: less confident)






Test on Ubuntu 18.04 equipped with P2000 NoteBook
- [0] Download Basic Envrionment
- (Download) opecn 3.2.0 w/ contrib, CUDA 9.0, cuDNN 7, ubuntu 16.04
- [1] Install Docker
- [2] Get Appropriate Docker Images
- Ref Site: https://hub.docker.com/
- [3] Other Docker properties to communicate host machine
- [4] Error Related
- (1) docker: Error response from daemon: could not select device driver "" with capabilities: [[gpu]].
- Ref Site: https://bluecolorsky.tistory.com/110
- (2) nvidia-container-cli: initialization error: load library failed: libnvidia-ml.so.1
- Ref Site: https://my-grope-log.tistory.com/20
- (1) docker: Error response from daemon: could not select device driver "" with capabilities: [[gpu]].
- [1] SuperGlue Error
- (1) ImportError: /home/sj/anaconda3/envs/feature_matching/bin/../lib/libgio-2.0.so.0: undefined symbol: g_unix_get_passwd_entry
- Ref Site: opencv/opencv#7940 (comment)
- (1) ImportError: /home/sj/anaconda3/envs/feature_matching/bin/../lib/libgio-2.0.so.0: undefined symbol: g_unix_get_passwd_entry
[1] Jianbo Shi and Carlo Tomasi. Good features to track. In Computer Vision and Pattern Recognition, 1994. Proceedings CVPR'94., 1994 IEEE Computer Society Conference on, pages 593–600. IEEE, 1994.
[2] David G. Lowe. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision, 60(2):91–110, November 2004.
[3] Herbert Bay, Tinne Tuytelaars, and Luc Van Gool. Surf: Speeded up robust features. Computer Vision–ECCV 2006, pages 404–417, 2006.
[4] Ethan Rublee, Vincent Rabaud, Kurt Konolige, Gary R. Bradski: ORB: An efficient alternative to SIFT or SURF. ICCV 2011: 2564-2571.
[5] Pablo Fernández Alcantarilla, Jesús Nuevo, and Adrien Bartoli. Fast explicit diffusion for accelerated features in nonlinear scale spaces. BMVC, pages 13.1–13.11, 2013.
[6] E. Tola, V. Lepetit, and P. Fua. Daisy: An efficient dense descriptor applied to wide baseline stereo. IEEE Transactions on Pattern Analysis and Machine Intelligence, 32(5):815–830, May 2010.
[7] Jiayi Ma, Ji Zhao, Jinwen Tian, Alan Yuille, and Zhuowen Tu. Robust Point Matching via Vector Field Consensus, IEEE Transactions on Image Processing, 23(4), pp. 1706-1721, 2014
[8] Jiayi Ma, Ji Zhao, Jinwen Tian, Xiang Bai, and Zhuowen Tu. Regularized Vector Field Learning with Sparse Approximation for Mismatch Removal, Pattern Recognition, 46(12), pp. 3519-3532, 2013
[9] DeTone, Daniel & Malisiewicz, Tomasz & Rabinovich, Andrew. SuperPoint: Self-Supervised Interest Point Detection and Description. CVPR Deep Learning for Visual SLAM Workshop (CVPR), 2018
[10] https://bkshin.tistory.com/entry/OpenCV-28-%ED%8A%B9%EC%A7%95-%EB%A7%A4%EC%B9%ADFeature-Matching
[11] https://stackoverflow.com/questions/18744051/what-the-hessian-minimum-threshold-means-on-the-surffeaturedetector-function
[12] https://www.researchgate.net/figure/Relation-between-hessian-threshold-value-and-Accuracy-of-SURF-detector-As-shown-in_fig2_309363445
[13] https://docs.opencv.org/3.4/d9/d37/classcv_1_1xfeatures2d_1_1DAISY.html
[14] https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=pckbj123&logNo=100203116086
[15] https://076923.github.io/posts/Python-opencv-38/
[16] https://docs.opencv.org/3.4/db/d95/classcv_1_1ORB.html#adc371099dc902a9674bd98936e79739c
[17] https://bkshin.tistory.com/entry/OpenCV-27-%ED%8A%B9%EC%A7%95-%EB%94%94%EC%8A%A4%ED%81%AC%EB%A6%BD%ED%84%B0-%EA%B2%80%EC%B6%9C%EA%B8%B0-SIFT-SURF-ORB
[18] https://docs.opencv.org/3.4/d7/d60/classcv_1_1SIFT.html
[19] https://leechamin.tistory.com/330
[20] https://github.com/mpkuse/robust_feature_matching
[21] https://github.com/ChanWoo25/SuperPoint2CPP
[22] https://github.com/magicleap/SuperPointPretrainedNetwork
[23] https://github.com/magicleap/SuperGluePretrainedNetwork
Thanks for Yeeun Kim help to get robust feature matching method !!
- Apply GCBB (Linear time vehicle relocation in SLAM paper)