Forked from original implementation
This python project is a complete implementation of Stereo PTAM, based on C++ project lrse/sptam and paper "S-PTAM: Stereo Parallel Tracking and Mapping Taihu Pire et al. RAS17", with some modifications.
S-PTAM is a Stereo SLAM system able to compute the camera trajectory in real-time. It heavily exploits the parallel nature of the SLAM problem, separating the time-constrained pose estimation from less pressing matters such as map building and refinement tasks. On the other hand, the stereo setting allows to reconstruct a metric 3D map for each frame of stereo images, improving the accuracy of the mapping process with respect to monocular SLAM and avoiding the well-known bootstrapping problem. Also, the real scale of the environment is an essential feature for robots which have to interact with their surrounding workspace.
S-PTAM system overview (from S-PTAM paper page 11):

As stated in the S-PTAM paper (page 39), S-PTAM's results on KITTI dataset is comparable to stereo version of ORB-SLAM2, and better than stereo LSD-SLAM. It's very inspiring, I'm trying to reproduce the results.
(of this implementation)
- Multithreads Tracking, Mapping, and Loop Closing;
- Covisibility Graph (representing the relation between keyframes, mappoints and measurements);
- Local Bundle Adjustment and Pose Graph Optimization;
- Motion Model (used for pose prediction, then for reliable feature matching);
- Point Clouds and Graph visualization;
- Data loader for datasets KITTI Odometry and EuRoC MAV;
- Reasonable speed: ~50ms per frame on EuRoC, and ~70ms per frame on KITTI.
- Python 3.6+
- numpy
- cv2
- g2o (python binding of C++ library g2o) for optimization
- pangolin (python binding of C++ library Pangolin) for visualization
python sptam.py --dataset kitti --path path/to/your/KITTI_odometry_dataset/sequences/00
or
python sptam.py --dataset euroc --path path/to/your/EuRoC_MAV_dataset/MH_01_easy
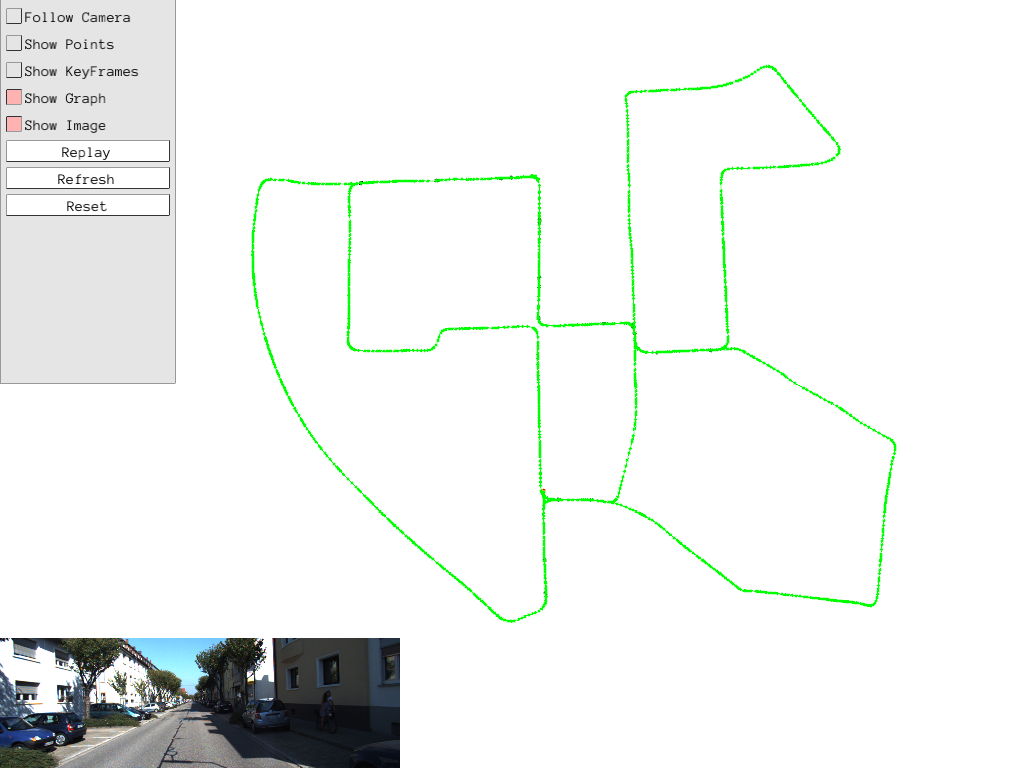
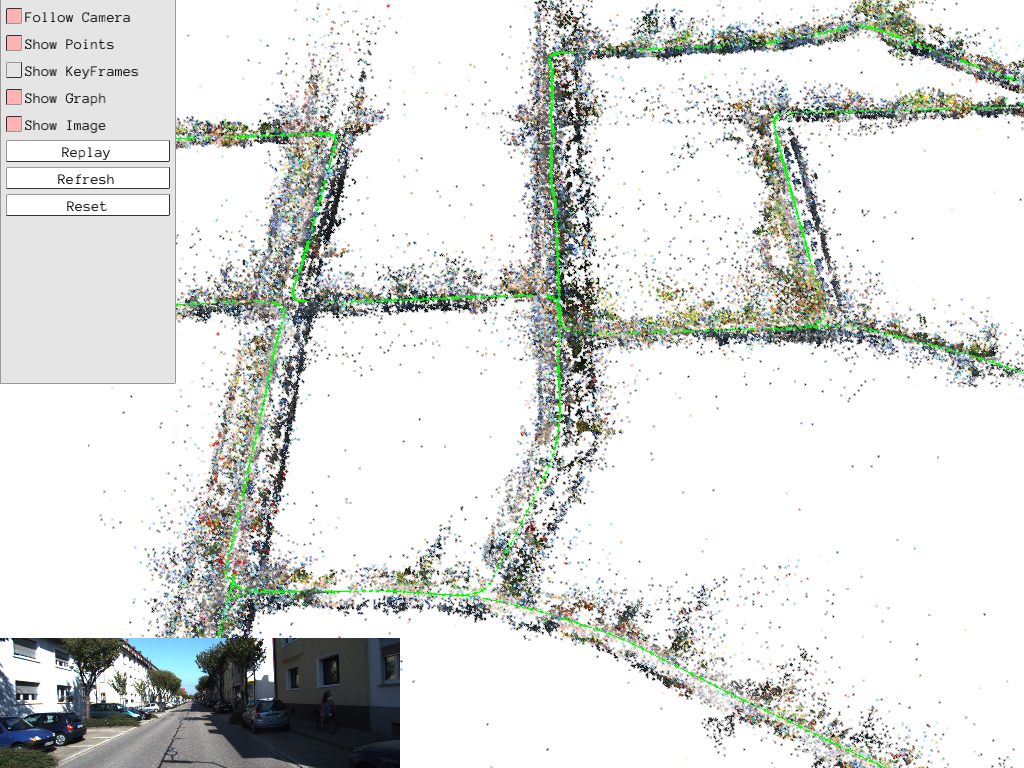
Visual results (screenshots from my experiment) on KITTI odometry sequence 00:
- graph:
As shown below, all loops have been closed (loop points are marked in black).
- point cloud:


SuperPoint Integration: SuperPoint is used as Visual Frontend and it's used for educational purpose only.
Exhaustive evaluation on datasets. (There seems to be a python package MichaelGrupp/evo for odometry/SLAM algorithm evaluation)
This python reimplementation is largely based on sptam, so it's licensed under GPLv3 License.
If you have problems related to the base S-PTAM algorithm, you can contact original authors lrse (robotica@dc.uba.ar), or refer to the related papers:
[1] Taihú Pire,Thomas Fischer, Gastón Castro, Pablo De Cristóforis, Javier Civera and Julio Jacobo Berlles.
S-PTAM: Stereo Parallel Tracking and Mapping
Robotics and Autonomous Systems, 2017.
[2] Taihú Pire, Thomas Fischer, Javier Civera, Pablo De Cristóforis and Julio Jacobo Berlles.
Stereo Parallel Tracking and Mapping for Robot Localization
Proc. of The International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015.
If you have interest in the python implementation here, just email me (Hang Qi, qihang@outlook.com);