amr_showcase_navigation.mp4
This repository contains a Gazebo and Isaac Sim simulation for a differential drive robot, equipped with an IMU, a depth camera, stereo camera and a 2D LiDAR. The primary contriution of this project is to support multiple ROS and Gazebo distros. Currently, the project supports the following versions -
- ROS Noetic + Gazebo Classic 11 (branch ros1)
- ROS2 Humble + Gazebo Classic 11 (branch ros2)
- ROS2 Humble + Gazebo Fortress (branch ros2)
- ROS2 Humble + Gazebo Harmonic (branch ros2)
- ROS2 Humble + Isaac Sim (branch ros2)
Each of the following sections describes depedencies, build and run instructions for each of the above combinations
In addition to ROS1 Noetic and Gazebo Classic installations, the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycatkin build --packages-select bcr_botTo install BCR bot in the binaries:
sudo apt-get install ros-noetic-bcr-botTo launch the robot in Gazebo,
roslaunch bcr_bot gazebo.launchTo view in rviz,
roslaunch bcr_bot rviz.launchThe launch file accepts multiple launch arguments,
roslaunch bcr_bot gazebo.launch
camera_enabled:=True \
two_d_lidar_enabled:=True \
position_x:=0.0 \
position_y:=0.0 \
orientation_yaw:=0.0 \
odometry_source:=world \
world_file:=small_warehouse.world \
robot_namespace:="bcr_bot"Note: To use stereo_image_proc with the stereo images excute following command:
ROS_NAMESPACE=bcr_bot/stereo_camera rosrun stereo_image_proc stereo_image_procIn addition to ROS2 Humble and Gazebo Classic installations, we need to manually install gazebo_ros_pkgs (since the same branch supports Classic and Fortress)
sudo apt-get install ros-humble-gazebo-ros-pkgsRemainder of the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycolcon build --packages-select bcr_botTo install BCR bot in the binaries:
sudo apt-get install ros-humble-bcr-botTo launch the robot in Gazebo,
ros2 launch bcr_bot gazebo.launch.pyTo view in rviz,
ros2 launch bcr_bot rviz.launch.pyThe launch file accepts multiple launch arguments,
ros2 launch bcr_bot gazebo.launch.py \
camera_enabled:=True \
two_d_lidar_enabled:=True \
stereo_camera_enabled:=False \
position_x:=0.0 \
position_y:=0.0 \
orientation_yaw:=0.0 \
odometry_source:=world \
world_file:=small_warehouse.sdf \
robot_namespace:="bcr_bot"Note: To use stereo_image_proc with the stereo images excute following command:
ros2 launch stereo_image_proc stereo_image_proc.launch.py left_namespace:=bcr_bot/stereo_camera/left right_namespace:=bcr_bot/stereo_camera/rightIn addition to ROS2 Humble and Gazebo Fortress installations, we need to manually install interfaces between ROS2 and Gazebo sim as follows,
sudo apt-get install ros-humble-ros-gz-sim ros-humble-ros-gz-bridge ros-humble-ros-gz-interfaces Remainder of the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycolcon build --packages-select bcr_botTo install BCR bot in the binaries:
sudo apt-get install ros-humble-bcr-botTo launch the robot in Gazebo,
ros2 launch bcr_bot ign.launch.pyTo view in rviz,
ros2 launch bcr_bot rviz.launch.pyThe launch file accepts multiple launch arguments,
ros2 launch bcr_bot ign.launch.py \
camera_enabled:=True \
stereo_camera_enabled:=False \
two_d_lidar_enabled:=True \
position_x:=0.0 \
position_y:=0.0 \
orientation_yaw:=0.0 \
odometry_source:=world \
world_file:=small_warehouse.sdfNote: To use stereo_image_proc with the stereo images excute following command:
ros2 launch stereo_image_proc stereo_image_proc.launch.py left_namespace:=bcr_bot/stereo_camera/left right_namespace:=bcr_bot/stereo_camera/rightIn addition to ROS2 Humble and Gazebo Harmonic installations, we need to manually install interfaces between ROS2 and Gazebo sim as follows,
sudo apt-get install ros-humble-ros-gzharmonicRemainder of the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycolcon build --packages-select bcr_botTo launch the robot in Gazebo,
ros2 launch bcr_bot gz.launch.pyTo view in rviz,
ros2 launch bcr_bot rviz.launch.pyThe launch file accepts multiple launch arguments,
ros2 launch bcr_bot gz.launch.py \
camera_enabled:=True \
stereo_camera_enabled:=False \
two_d_lidar_enabled:=True \
position_x:=0.0 \
position_y:=0.0 \
orientation_yaw:=0.0 \
odometry_source:=world \
world_file:=small_warehouse.sdfNote:
- To use stereo_image_proc with the stereo images excute following command:
ros2 launch stereo_image_proc stereo_image_proc.launch.py left_namespace:=bcr_bot/stereo_camera/left right_namespace:=bcr_bot/stereo_camera/right- Harmonic support is not available in the bcr_bot binaries yet.
Warning: gz-harmonic cannot be installed alongside gazebo-classic (eg. gazebo11) since both use the gz command line tool.
In addition to ROS2 Humble Isaac Sim installation with ROS2 extension is required. Remainder of bcr_bot specific dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycolcon build --packages-select bcr_botTo launch the robot in Isaac Sim:
- Open Isaac Sim and load the
warehouse_scene.usdorscene.usdfrom here. - Add in extra viewports for different camera views.
- Start the Simulation: Run the simulation directly within Isaac Sim.
- The following USDs are included in the package:
warehouse_scene.usd- Warehouse scene with a robot.scene.usd- Scene with a robot in a empty world.bcr_bot.usd- Robot model that can be imported into any scene.ActionGraphFull.usd- Action graph for the robot to publish all the required topics.
To view in rviz:
ros2 launch bcr_bot rviz.launch.pyNOTE: The command to run mapping and navigation is common between all versions of gazebo and Isaac sim see here.
SLAM Toolbox is an open-source package designed to map the environment using laser scans and odometry, generating a map for autonomous navigation.
NOTE: The command to run mapping is common between all versions of gazebo.
To start mapping:
ros2 launch bcr_bot mapping.launch.pyUse the teleop twist keyboard to control the robot and map the area:
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=/bcr_bot/cmd_velTo save the map:
cd src/bcr_bot/config
ros2 run nav2_map_server map_saver_cli -f bcr_mapNav2 is an open-source navigation package that enables a robot to navigate through an environment easily. It takes laser scan and odometry data, along with the map of the environment, as inputs.
NOTE: The command to run navigation is common between all versions of gazebo and Isaac sim.
To run Nav2 on bcr_bot:
ros2 launch bcr_bot nav2.launch.py-
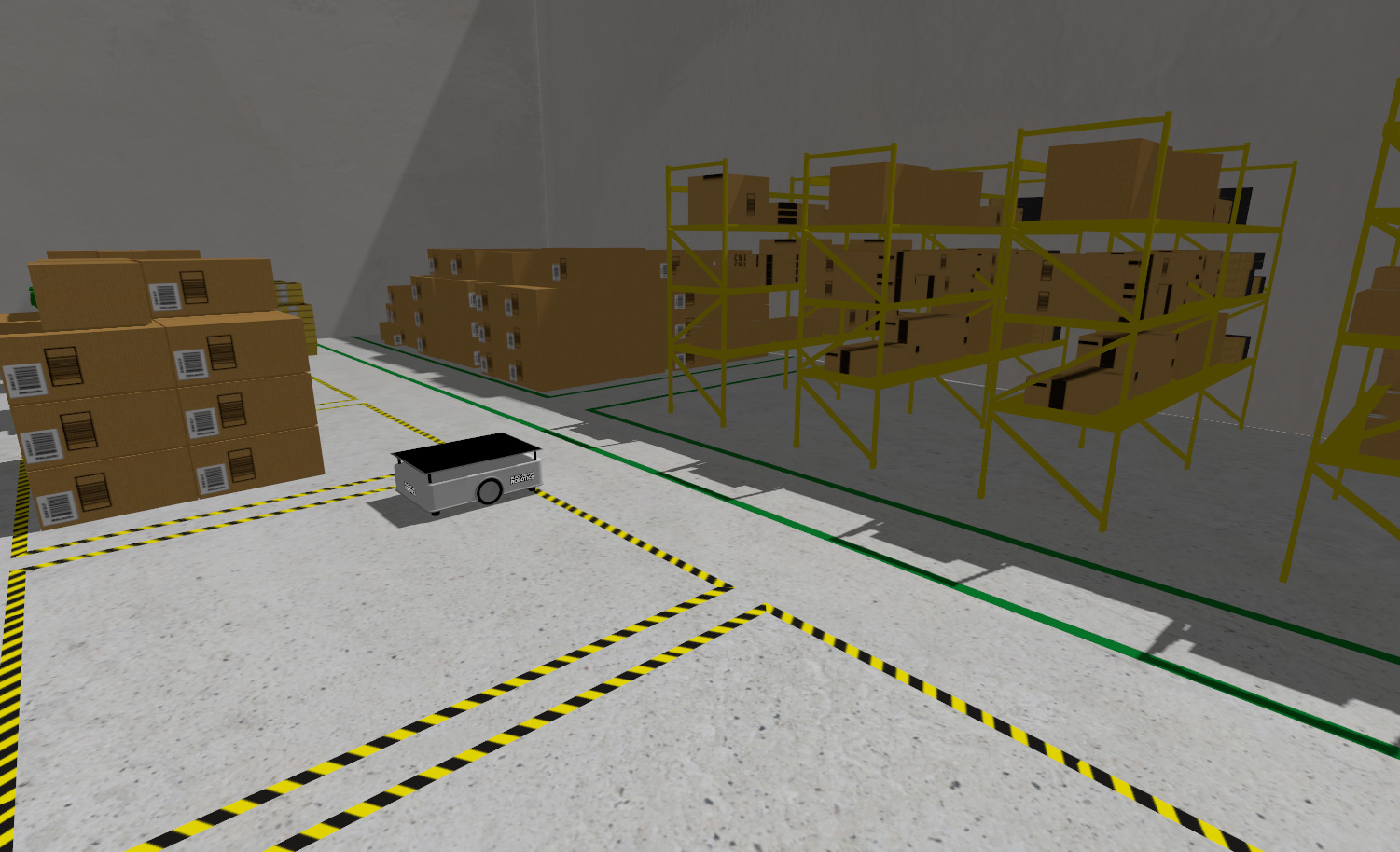
Gz Sim (Ignition Gazebo) (small_warehouse World):
-
Isaac Sim:

-
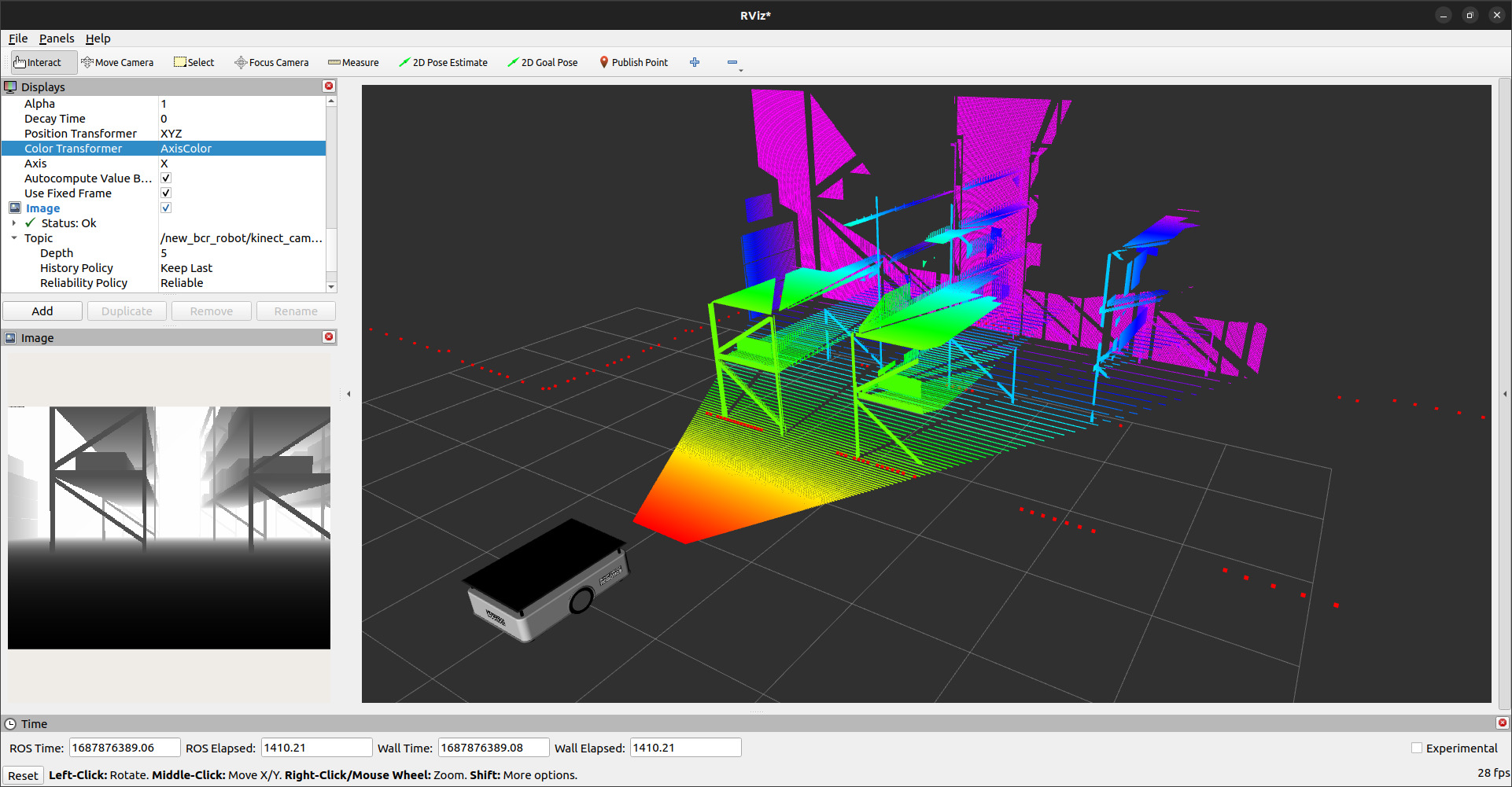
Rviz (Depth camera) (small_warehouse World):