Experiments with MEMS accelerometer, angular rate and magnetometer sensor fusion algorithms in MATLAB.
The first part around set-1 is concerned with direct estimation from raw data. The second part around set-2 is concerned with filtering the raw inputs to smoothen the estimation.

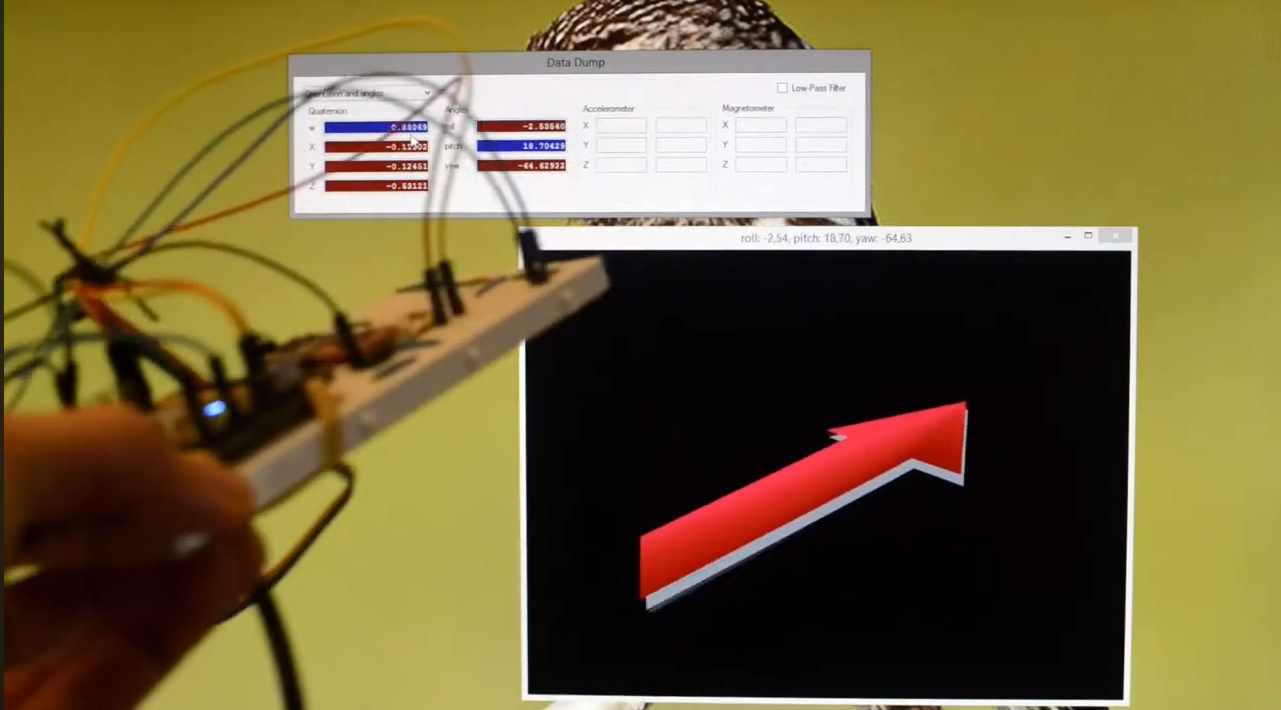
The MATLAB code was later factored into an on-device pose orientation estimation on a Freescale FRDM-KL25Z board, the code of which can be found in the frdm-kl25z-marg-fusion repo. Here, two of the eigenvectors of the direction cosine matrix are estimated directly on the device using a regular (i.e., non-extended, non-unscented) Kalman filter with TRIAD. A video recording of the outcome can be found on YouTube: