Related Paper:
- Wu Y, Zhang Y, Zhu D, et al. EAO-SLAM: Monocular Semi-Dense Object SLAM Based on Ensemble Data Association[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020: 4966-4973. [Paper] [Arxiv] [YouTube] [bilibili] [Project page].
- Extended Work
- If you use the code in your academic work, please cite the above paper.
- Prerequisites are the same as semidense-lines. If compiling problems met, please refer to semidense-lines and ORB_SLAM2.
- The code is tested in Ubuntu 16.04, opencv 3.2.0/3.3.1, Eigen 3.2.1.
chmod +x build.sh
./build.sh
-
3.0 We provide a demo that uses the
TUM rgbd_dataset_freiburg3_long_office_householdsequence; please download the dataset beforehand. The offline object bounding boxes are indata/yolo_txtsfolder. -
3.1 Object size and orientation estimation.
- use iForest and line alignment:
./Examples/Monocular/mono_tum LineAndiForest [path of tum fr3_long_office] - only use iForest:
./Examples/Monocular/mono_tum iForest [path of tum fr3_long_office] - without iForest and line alignment:
./Examples/Monocular/mono_tum None [path of tum fr3_long_office]

- use iForest and line alignment:
-
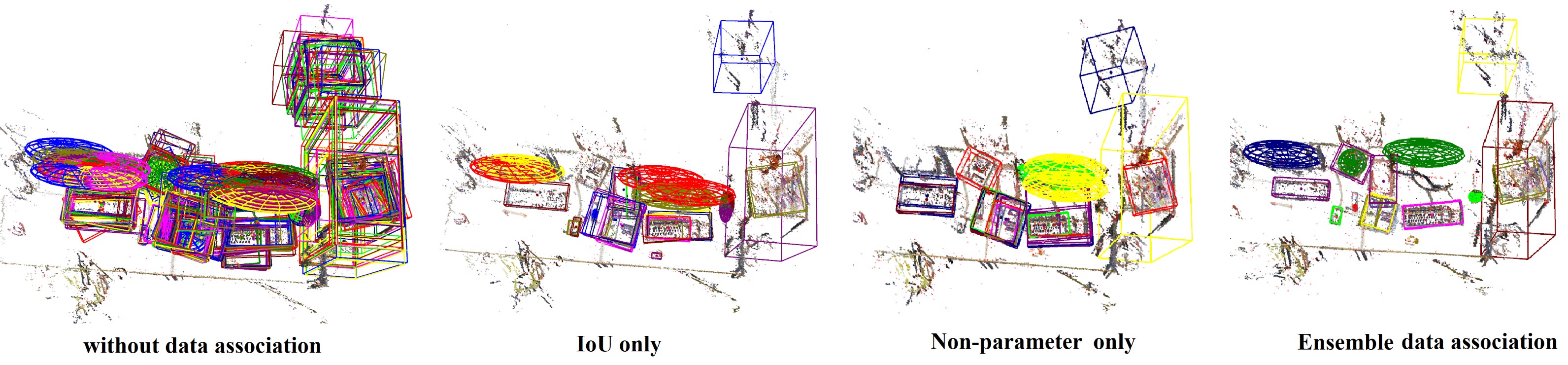
3.2 Data association
- without data association:
./Examples/Monocular/mono_tum NA [path of tum fr3_long_office] - data association by IoU only:
./Examples/Monocular/mono_tum IoU [path of tum fr3_long_office] - data association by Non-Parametric-test only:
./Examples/Monocular/mono_tum NP [path of tum fr3_long_office] - data association by our ensemble method:
./Examples/Monocular/mono_tum EAO [path of tum fr3_long_office]
- without data association:
-
3.3 The full demo on TUM fr3_long_office sequence:
./Examples/Monocular/mono_tum Full [path of tum fr3_long_office]- If you want to see the semi-dense map, you may have to wait a while after the sequence ends.
- Since YOLO (which was not trained in this scenario) made a lot of false detections at the start of the sequence, so we adopted a stricter elimination mechanism, which resulted in the deletion of many objects at the start.


- More experimental results can be found on our project page.
- Extended work: project page
- This is an incomplete version of our paper. If you want to use it in your work or with other datasets, you should prepare the offline semantic detection/segmentation results or switch to online mode. Besides, you may need to adjust the data association strategy and abnormal object elimination mechanism (We found the misdetection from YOLO has a great impact on the results).
Thanks for the great work: ORB-SLAM2, Cube SLAM, and Semidense-Lines.
- Mur-Artal R, Tardós J D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. PDF, Code
- Yang S, Scherer S. Cubeslam: Monocular 3-d object slam[J]. IEEE Transactions on Robotics, 2019, 35(4): 925-938. PDF, Code
- He S, Qin X, Zhang Z, et al. Incremental 3d line segment extraction from semi-dense slam[C]//2018 24th International Conference on Pattern Recognition (ICPR). IEEE, 2018: 1658-1663. PDF, Code
- Yanmin Wu, Email: wuyanminmax@gmail.com
- Corresponding author: Yunzhou Zhang *, Email: zhangyunzhou@mail.neu.edu.cn
@inproceedings{wu2020eao,
title={EAO-SLAM: Monocular semi-dense object SLAM based on ensemble data association},
author={Wu, Yanmin and Zhang, Yunzhou and Zhu, Delong and Feng, Yonghui and Coleman, Sonya and Kerr, Dermot},
booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4966--4973},
year={2020},
organization={IEEE}
}
@inproceedings{wu2021object,
title={Object SLAM-Based Active Mapping and Robotic Grasping},
author={Wu, Yanmin and Zhang, Yunzhou and Zhu, Delong and Chen, Xin and Coleman, Sonya and Sun, Wenkai and Hu, Xinggang and Deng, Zhiqiang},
booktitle={2021 International Conference on 3D Vision (3DV)},
pages={1372-1381},
year={2021},
organization={IEEE}
}