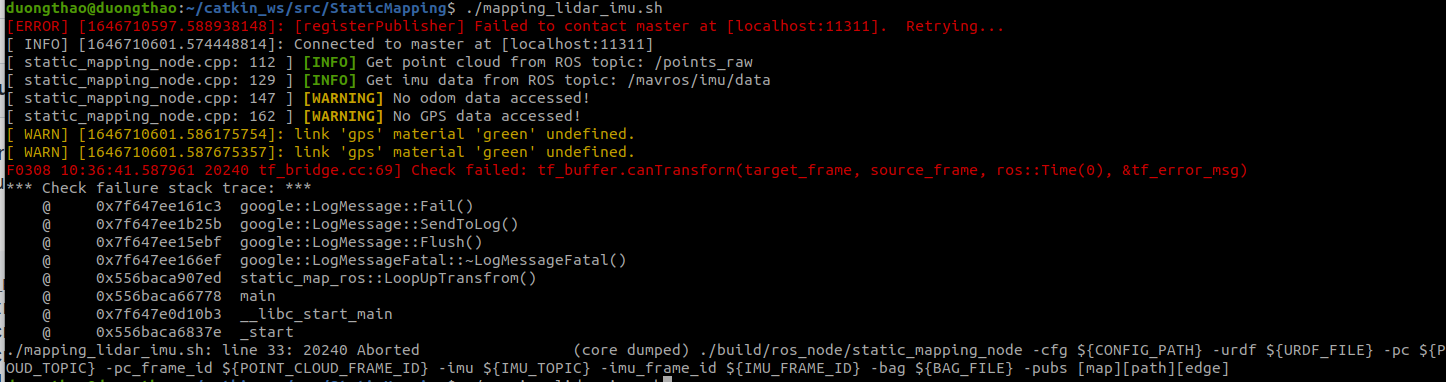
Check failed: tf_buffer.canTransform(target_frame, source_frame, ros::Time(0), &tf_error_msg)
duongthao1218 opened this issue · 9 comments
When I run ./mapping_lidar_imu.sh, program failed. How can I fix it?
If you notice the 5th line of the mapping_lidar_imu.sh, there is a file urdf/test2.urdf loaded by the main process to set transforms among different frames. You may need to adjust this file with your frame ids. Here is a reference for urdf.
Next to that, it's also supported to listen to /tf to set transforms.
@EdwardLiuyc Thank u so much.
After process finished, I got a problem about my map. My map didnt show enough pointcloud that I collected.
I use Velodyne - VLP16, ardupilot cube (IMU data) and collect dataset indoor.
Information of my bag file, drive link

I used CloudCompare and this is result.

@duongthao1218
Sorry for the late response. This is what I got from your data (I tried first without imu), If you still want to use imu, you may need to adjust the parameters for imu, e.g: frequency:

@duongthao1218
This is what I got when mapping with lidar & imu, as you can see no big difference with the other one above. You lidar never moved so I assume imu isn't vital here.

BTW, seems that I really need to add a wiki for the parameters.
@EdwardLiuyc Thank you for your response. After I ran ./mapping_lidar_only.sh and rosbag play <path to my bag file> , the output is not similar to the result that you showed me above. I'm sure that I changed lidar and imu topic name correctly.
@duongthao1218 remember to set accumulate_cloud_num to 1 in the config xml file.
@EdwardLiuyc yea, I set accumulate_cloud_num to 1 in the config xml file before but there was no change

@duongthao1218 So did you get a whole_map.pcd, could you check that? The output for static_map.pcd is disabled by default.
@EdwardLiuyc Oh, I checked path.pcd but not whole_map.pcd.
Thank u so much. I apologize for my shortcomings.