This is a python implementation of RGBD-PTAM, the code is modified from stereo_ptam, which is based on C++ project lrse/sptam and paper "S-PTAM: Stereo Parallel Tracking and Mapping" Taihu Pire et al. RAS17.
RGBD-PTAM is a RGBD SLAM system able to compute the camera trajectory in real-time. It heavily exploits the parallel nature of the SLAM problem, separating the time-constrained pose estimation from less pressing matters such as map building and refinement tasks. On the other hand, the RGBD setting allows to reconstruct a metric 3D map for each frame, improving the accuracy of the mapping process with respect to monocular SLAM and avoiding the well-known bootstrapping problem. Also, the real scale of the environment is an essential feature for robots which have to interact with their surrounding workspace.
RGB-D system has direct depth measurements, by setting a pasudo stereo baseline, disparity can be computed from depth, then stereo measurements can be synthetized. Now the problem is converted to stereo SLAM, we can directly reuse S-PTAM's solution and stereo_ptam's code. Below is S-PTAM's system overview (from S-PTAM paper page 11):

Because one RGB-D frame has only one image, the computation burden is smaller than stereo setting, actually this project is faster than stereo_ptam, reach 30~50ms per frame (depending on keyframes adding frequency).
- Multithreads Tracking, Mapping, and Loop Closing
- Covisibility Graph
- Local Bundle Adjustment
- Pose Graph Optimization
- Motion Model
- Visualization
- Data loader for datasets TUM RGB-D and ICL-NUIM RGB-D
- Relocalization (tracking failure recovery)
- Dense point clouds visualization
- Exhaustive evaluation
- Python 3.6+
- numpy
- cv2
- g2o (python binding of C++ library g2o) for optimization
- pangolin (python binding of C++ library Pangolin) for visualization
python ptam.py --dataset tum --path path/to/your/TUM_RGBD_dataset/rgbd_dataset_freiburg1_room
or
python ptam.py --dataset icl --path path/to/your/ICL-NUIM_RGBD_dataset/living_room_traj3_frei_png
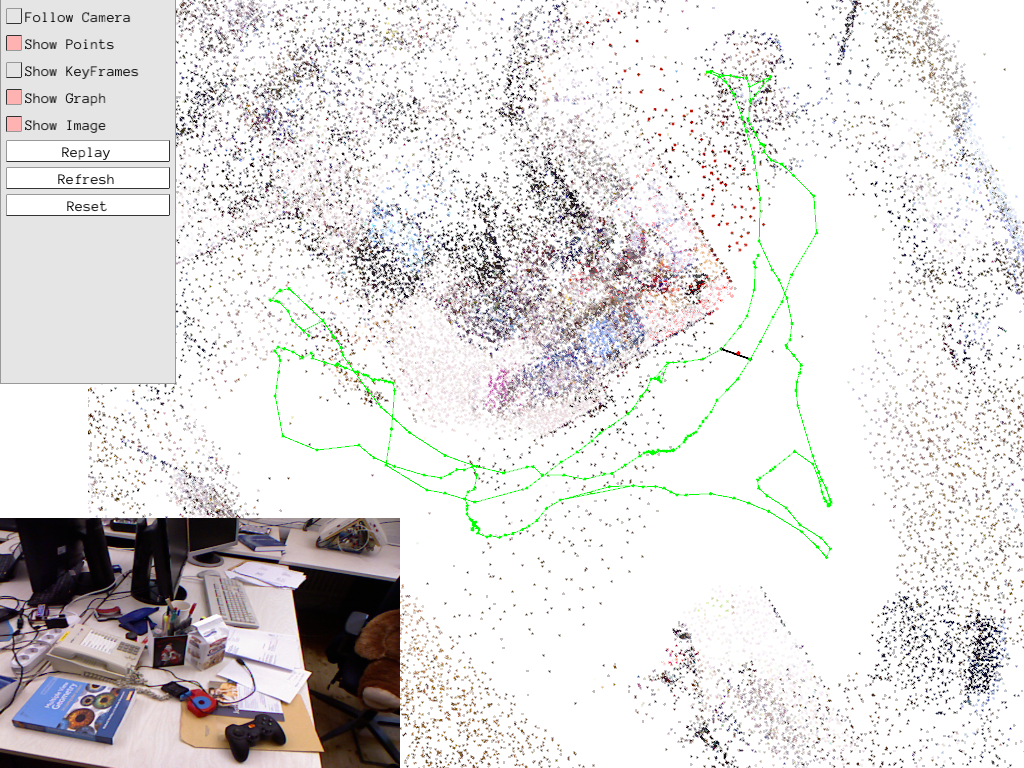
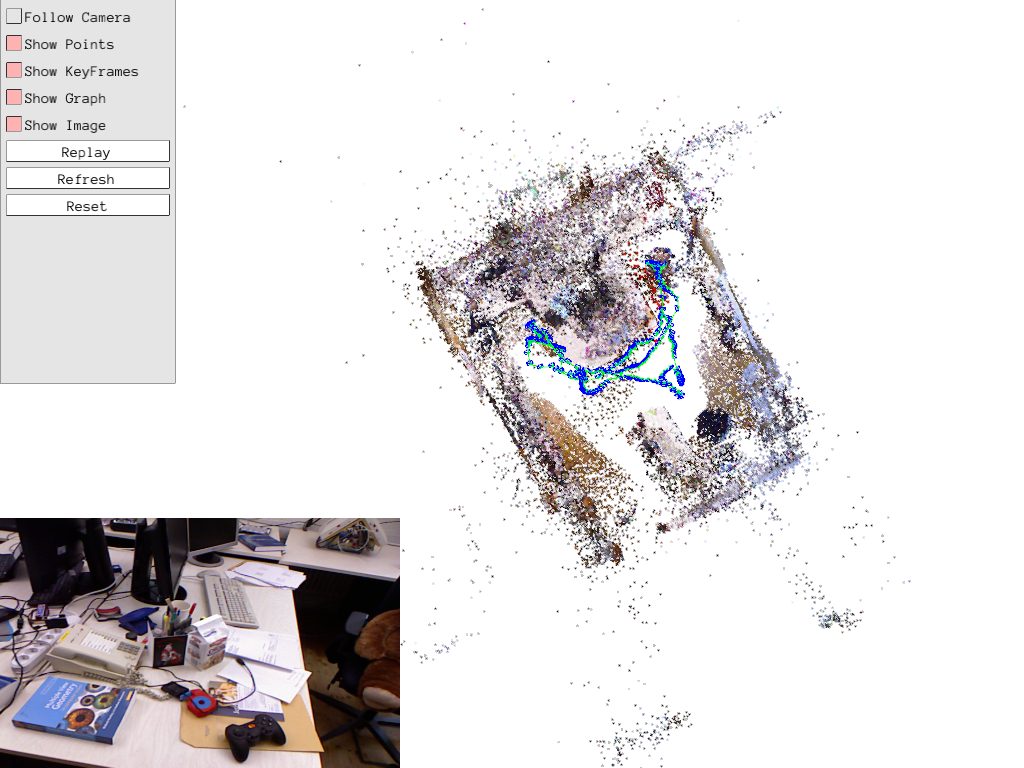
Visual results on TUM-RGBD dataset sequence "rgbd_dataset_freiburg1_room":
- graph:
- point cloud (sparse):


Following stereo_ptam, this project is released under GPLv3 License.
If you have problems related to the base S-PTAM algorithm, you can contact original authors lrse (robotica@dc.uba.ar), or refer to the paper:
[1] Taihú Pire,Thomas Fischer, Gastón Castro, Pablo De Cristóforis, Javier Civera and Julio Jacobo Berlles.
S-PTAM: Stereo Parallel Tracking and Mapping
Robotics and Autonomous Systems, 2017.
If you have interest in this python implementation, email me (Hang Qi, qihang@outlook.com);