![]()
Collision Avoidance System for Self-Driving Vehicles by Delta Autonomy, Robotics Institute, CMU. This stack was developed for my MRSD capstone project.
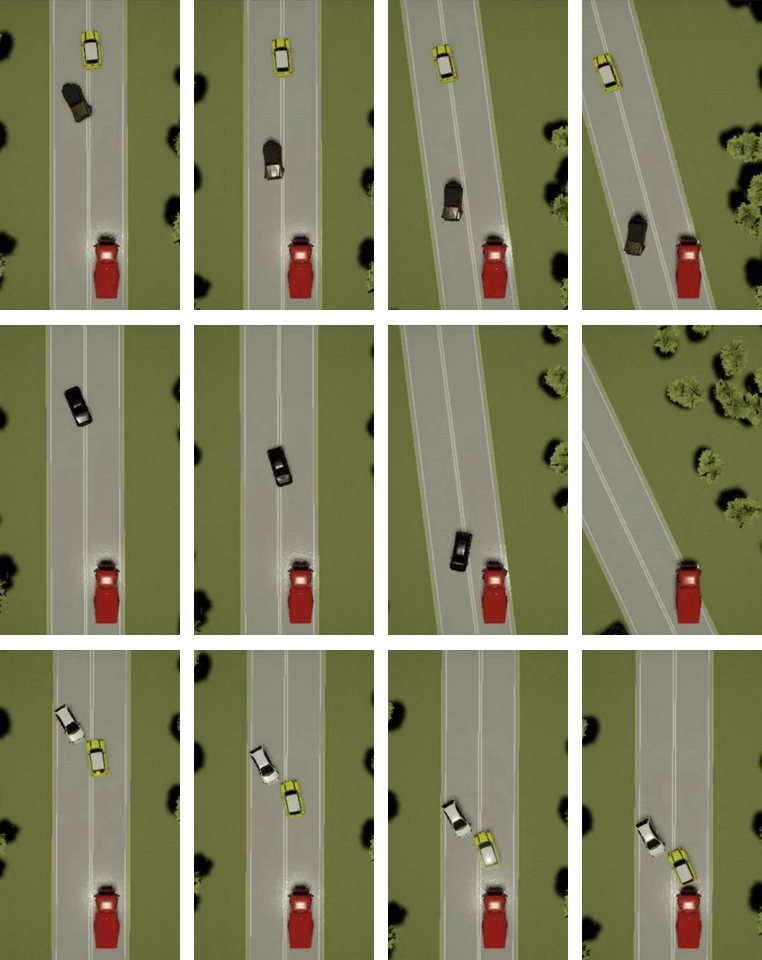
Our use-case involves an oncoming vehicle encroaching into the ego-vehicle's (heavy-duty truck) lane, on a two-lane countryside highway. The perception algorithms perform the detection and tracking of vehicles, and lane marking detection, using a sensor fusion of a monocular camera and RADAR. The prediction algorithms predict the trajectories of all vehicles in the environment including the ego-vehicle. Based on the predicted trajectories, the probability of collision, position and time-to-impact is computed. An evasive maneuver, such as steering or braking, is planned and executed to avoid or mitigate the crash. The project was developed in Carla simulator and ROS.
Find out more about our project on deltaautonomy.github.io.
- Collisions detected in 90% cases with 80% accuracy, and mitigated in 60% cases via an evasive maneuver or braking strategy.
- Achieved mAP of 0.7-0.9 for object detection, lane detection with offsets less than 0.5m.
- Our tracking and sensor fusion pipeline achieved MOTA 75% and MOTP 85%.
- Prediction of trajectories of oncoming vehicles within an RMSE of 2m, and ego-vehicle within an RMSE of 1m, 2-3 seconds in future.
- The entire pipeline runs at 21-24 FPS along with a NVIDIA Titan V GPU.
- We also developed custom maps in RoadRunner and created collision scenarios in Carla.
- Developed a JavaScript based dashboard GUI interfaced with ROS in real-time.
This repository is only a collection of all the ROS packages developed by us. Feel free to raise issues and pull requests on the original repositories.

![]()


