Public place to ask questions, post and discuss issues
laboshinl opened this issue · 177 comments
The mapping is working, but in some point the pointcloud suddenly returns to the initial position and I get this error:
laserOdometry: /build/buildd/pcl-1.7-1.7.1/kdtree/include/pcl/kdtree/impl/kdtree_flann.hpp:136: int pcl::KdTreeFLANN<PointT, Dist>::nearestKSearch(const PointT&, int, std::vector<int>&, std::vector<float>&) const [with PointT = pcl::PointXYZI; Dist = flann::L2_Simple<float>]: Assertion `point_representation_->isValid (point) && "Invalid (NaN, Inf) point coordinates given to nearestKSearch!"' failed. [laserOdometry-2] process has died [pid 10107, exit code -6, cmd /home/vicky/catkin_ws/devel/lib/loam_velodyne/laserOdometry __name:=laserOdometry __log:=/home/vicky/.ros/log/580f7db4-ffc0-11e5-aee2-74d4358625bb/laserOdometry-2.log]. log file: /home/vicky/.ros/log/580f7db4-ffc0-11e5-aee2-74d4358625bb/laserOdometry-2*.log [laserOdometry-2] restarting processI think when a keypoint from the registration process is not found, then the node laserOdometry node crashed and restart, then the mapping does not work because it does not continue in the same position as before, however it start again from the initial position.
When you run your example:
roslaunch ~/catkin_ws/src/loam_velodyne/launch/loam_velodyne.launch rosbag play ~/Downloads/nsh_indoor_outdoor.bagdo you obtain the same error?
How can I avoid this error? Many thanks in advance.
I have the same errors with the nsh bag.
Works great with sample VLP16 data
Is this a version you wrote or is it the original implementation or did you piece it back together from the help pages?
Did you write the package and launch file?
I've created package and launch file. I've also modified scanRegistration.cpp to get it to work with my VLP16 (I think originally it was for HDL32 )
@laboshinl Do you know if it saves the map generated anywhere? and if not, are you planning on modifying it so it does?
When I build with catkin "source ~catkin_ws/devel/setup.bash", there is an error "bash: ~catkin_ws/devel/setup.bash: No such file or directory". Please help me to solve it. Thank you. @laboshinl
Hi @DamonMIN did you setup your catkin workspace correctly based on the ROS documentation ? Do you have the file in that directory ?
Hi@ZepherusFF
I have the "setup.bash" file in the folder ~catkin_ws/devel. The following text is the content of this file.
////////////////////////////////////////////////////////////////////
#!/usr/bin/env bash
# generated from catkin/cmake/templates/setup.bash.in
CATKIN_SHELL=bash
# source setup.sh from same directory as this file
_CATKIN_SETUP_DIR=$(builtin cd "`dirname "${BASH_SOURCE[0]}"`" > /dev/null && pwd)
. "$_CATKIN_SETUP_DIR/setup.sh"
//////////////////////////////////////////////////////////////////
@DamonMIN You have missed "/"
laboshinl@rtc ~/catkin_ws $ source ~catkin_ws/devel/setup.bash
bash: ~catkin_ws/devel/setup.bash: No such file or directory
laboshinl@rtc ~/catkin_ws $ source ~/catkin_ws/devel/setup.bash
In second terminal play sample velodyne data from VLP16 rosbag:
rosbag play ~/Downloads/2014-11-10-10-48-31_Velodyne-VLP_20Hz_Hecker Pass.pcap
[ INFO] [1461760124.789037514]: Opening /home/aicrobo/Downloads/2014-11-10-10-48-31_Velodyne-VLP_20Hz_Hecker
[FATAL] [1461760124.789397586]: Error opening file: /home/aicrobo/Downloads/2014-11-10-10-48-31_Velodyne-VLP_20Hz_Hecker
read from velodyne VLP16 sample pcap:
roslaunch velodyne_pointcloud VLP16_points.launch pcap:="/home/aicrobo/Downloads/2014-11-10-10-48-31_Velodyne-VLP_20Hz_Hecker Pass.pcap"
[VLP16_points.launch] is neither a launch file in package [velodyne_pointcloud] nor is [velodyne_pointcloud] a launch file name
The traceback for the exception was written to the log file
It seems that the launch file can't find or recognize the velodyne data (The data was downloaded from VLP16 sample pcap).
You should compile velodyne driver
https://github.com/ros-drivers/velodyne/tree/master/velodyne_pointcloud
@DamonMIN For the VLP16 you need to compile yourself the driver
Is there any way to export the data or is just for visualization?. By the way, works great.
@fazt
You can save registered clouds to pcd and open with ccViewer
rosrun pcl_ros pointcloud_to_pcd input:=/velodyne_cloud_registered
It seems that I can't run it successfully. I used the "VLP16 sample pcap" data sets. Should I calibrate the Velodyne sensor at first?
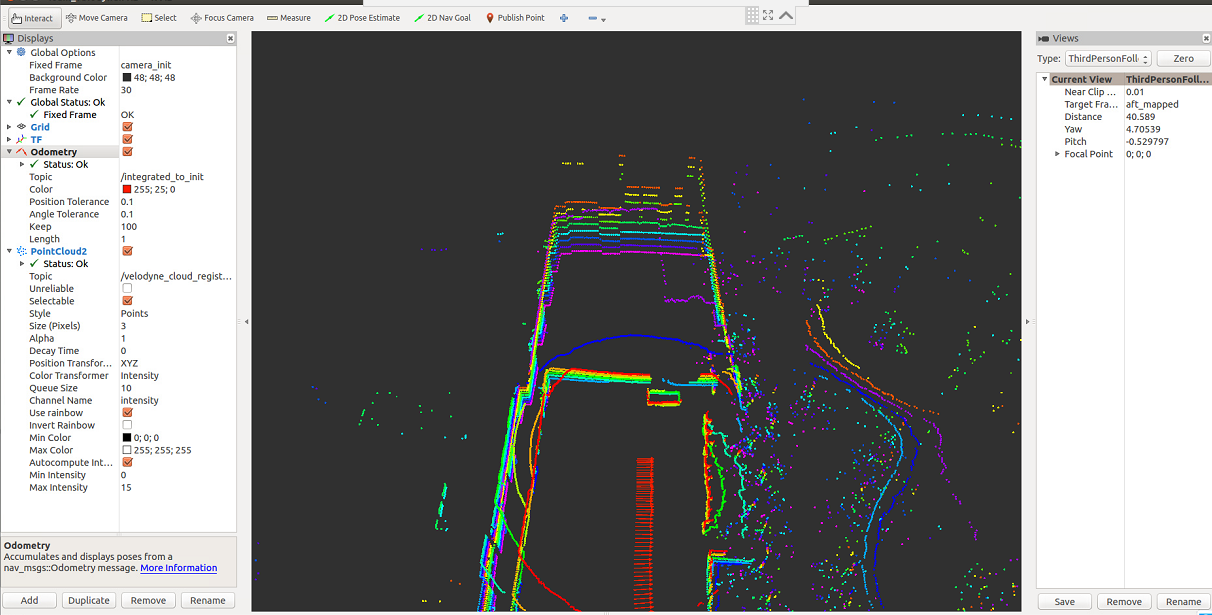
At first, the 3D data points couldn't be displayed in rviz, only two odom topics /laser_odom_to_init and /integrated_to_init could be displayed. The locations of these odom topics are strange. Initially, they start at a same position. They are getting further in the distance. And the orientations of these two topics are also very strange.
Then I found if the displayed style of pointcloud2 is adjusted from "points" to "squares", the 3D data points could be displayed. However, I couldn't see the constructed 3D map in rviz.
Looking forwards to any great advices.
Best!
only two odom topics /laser_odom_to_init and /integrated_to_init could be displayed. The locations of these odom topics are strange. Initially, they start at a same position. They are getting further in the distance. And the orientations of these two topics are also very strange.
Did you clone latest version of repo? It has different rviz config.
You should look only at RED odom lines. Just disable GREEN. Arrows are perpendicular to the the direction of movement for some reason.
I couldn't see the constructed 3D map in rviz.
Try setting 'Decay Time' parameter to 1000 in topic 'velodyne_cloud_registered'

@laboshinl Thanks! It seems works fine now!
Dear Leonid,
Hello, I'm a Phd student from Univ. de Bourgogne in France. And recently I found your awesome project on github using Zhang's method on SLAM. I tested your code and it was working very well. However, I have some questions on the performances of the registration results. I tested the dataset that you shared on Github (VLP16 rosbag). Here are the results that I obtain (Fig.1 is the top view, and Fig.2 is the side view) . As we know, the Zhang's method achieves the best performances among the KITTI dataset (the LOAM ranked second, while V-LOAM ranked first). But the registered clouds that I got from the dataset that you provided are bent (see Fig.2).
I would like to ask that if you are having the same problem on this testing data or not? Or do you know the reason why it happens?
Thank you very much and look forward to your reply!
Cansen

Inline image 1

Inline image 2
Hi,
The LOAM paper defines a formula for computing curvature that normalises by the distance of the point from the origin (equation (1) in the paper). However, it seems like the curvature computed in line 378 of scanRegistration.cpp is not normalised by the distance of the point from the origin. Any idea why this might be the case?
Thanks!
@laboshinl When testing the loam_velodyne with real data, I noticed that the transform frames are in a non-standard coordinate system. Namely, sensor forward is mapped to +z, sensor up is mapped to +y, and sensor left is mapped to +x. Is there a reason for this, and where can I easily change it to standard cartesian?
@TopGunSnake I believe it's because that's the convention the paper uses (page 2 at http://www.roboticsproceedings.org/rss10/p07.pdf).
@laboshinl What units are distances in?
@haoala meters I think
think@laboshinl What units are distances in?
@laboshinl For the error generated in nsh_indoor_outdoor.bag is it possible to make that when it losses odometry it keeps the last pose?
And I have other question, is it possible to add the help of an IMU or wheel odometry?
@Kailegh There is no error for me with current version
60db8c1
Thanks a lot, works perfect now I had an old version sorry. Great work man! Although this version seems to have less points, do you use a voxel grid or something like that?
Regarding the IMU, do you think there is any advantage of including one?
An important question would be what is the maximun speed this can work?
I believe there's a bug with laserOdometry.cpp. Lines 458-459 should really go after line 470. You want to reset the points used to build the Jacobian at the start of each new iteration, and not keep points from previous iterations.
Can you share the original version of scanRegistration.cpp that works with HDL-32E? Thanks.
@doublej317 I was mistaken, it doesn't seem to be for HDL-32. Original sources can be found here: http://docs.ros.org/indigo/api/loam_velodyne/html/files.html
@laboshinl Thank you :)
@haythamd I'm not really sure, but it looks like a problem with environment variable, have you executed the following command?
source ~/catkin_ws/devel/setup.bash
Is your ROS configured correctly?
@haythamd Oh, I think you should also execute
source ~/catkin_ws/devel/setup.bash in second terminal window to make your self-compilled velodyne driver work
@haythamd
Hi, I suggest you read the point cloud using PCL or Meshlab, it's much more convenient. However, if you need to use some functions of cloudcompare, feel free to go. Just check the report and follow step by step.
Cansen
@laboshinl
I have found the reason , the Lidar VLP-16 is malfunction. one channel is no signal.~~~
@laboshinl
I have successfully implemented according to your steps.
But when I connect the VLP-16 Lidar (roslaunch velodyne_pointcloud VLP16_points.launch _ip_address:=192.168.1.201),
Usually happen the following error
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
[scanRegistration-2] process has died [pid 13615, exit code -11, cmd /home/ctwu/ROS_Code/catkin_loam/devel/lib/loam_velodyne/scanRegistration __name:=scanRegistration __log:=/home/ctwu/.ros/log/1f7faff2-5d33-11e6-98e2-74d02b61e376/scanRegistration-2.log].
log file: /home/ctwu/.ros/log/1f7faff2-5d33-11e6-98e2-74d02b61e376/scanRegistration-2.log
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
(the scanRegistration-2.log can't find in the folder)
@TopGunSnake @haoala I noticed the non-standard coordinate frames and thought maybe it was LOAM that was changing the coordinate frames but when you stream Point cloud data from the LiDAR and display it on Rviz, it still has the same coordinate frames as we see on LOAM. Were you guys able to fix the coordinate frames by writing a tf?
I had to ditch this node due to time constraints, but once I finish my
project, I will be looking at this node again.
Jake Webster
On Aug 18, 2016 11:51 AM, "arjunmenon03" notifications@github.com wrote:
@TopGunSnake https://github.com/TopGunSnake @haoala
https://github.com/haoala I noticed the non-standard coordinate frames
and thought maybe it was LOAM that was changing the coordinate frames but
when you stream Point cloud data from the LiDAR and display it on Rviz, it
still has the same coordinate frames as we see on LOAM. Were you guys able
to fix the coordinate frames by writing a tf?—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
#3 (comment),
or mute the thread
https://github.com/notifications/unsubscribe-auth/AMXAMOlidSDO4LXswZkSii7hzEmarm9rks5qhI2XgaJpZM4IEd9W
.
For my application, the lidar data was coming in using the coordinate
system I wanted, so I didn't have to change it there. In any case, using a
different coordinate frame doesn't change the algorithm, and it shouldn't
be too hard to change the coordinate frame of the incoming lidar data.
On 19 August 2016 at 00:51, arjunmenon03 notifications@github.com wrote:
@TopGunSnake https://github.com/TopGunSnake @haoala
https://github.com/haoala I noticed the non-standard coordinate frames
and thought maybe it was LOAM that was changing the coordinate frames but
when you stream Point cloud data from the LiDAR and display it on Rviz, it
still has the same coordinate frames as we see on LOAM. Were you guys able
to fix the coordinate frames by writing a tf?—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
#3 (comment),
or mute the thread
https://github.com/notifications/unsubscribe-auth/AJGwB0pQpozVu5EwvbVwWJXhU97VlnOoks5qhI2XgaJpZM4IEd9W
.
@TopGunSnake @haoala I wrote a simple fixed frame that ended up putting it in the same coordinate frame as the Velodyne. Quaternion of [0, 0.7071, 0.7071, 0] will put it in the Velodyne's coordinate frame. You are right @haoala , this does not change the algorithm whatsoever.
Hi guys, I am using LOAM too!
are there anybody use LOAM on Hokuyo ? I had some problems on synchronization of laser and imu.
@desmosedic What frames was the transform for?
@laboshinl ,@haoala ,Hi, I have run the command "rosrun pcl_ros pointcloud_to_pcd input:=/velodyne_cloud_registered" and then I open them in CloudCompare,but it seems to be not registrated.However, the topic "laser_cloud_surround" is the all registrated points. So would you like to help me how the topic "laser_cloud_surround" can be saved in pcd format.Thank you!
@fazt
I recommend this package to export point cloud data. https://github.com/ShineSong/gatherpclmsg
I know this is asking a lot, but could you write some comments in the code? I have tried to understand how it works, but is everything too messy and I do not really get it.
Thanks a lot anyway for your code
@amenonDJI
rosrun pcl_ros pointcloud_to_pcd input:=/velodyne_cloud_registered saves .pcd for each registered pointcloud. Then this files should be simultaneously opened with CloudCompare
@amenonDJI I have tried with your help,and I have no issues now.
Thank you
@laboshinl That makes sense. I opened them simultaneously and they work fantastic. In fact I took some measurements to see what kind of error I was receiving and I was able to measure with less than <2% of error with measurements. Do you have any error % from your tests. LOAM paper lists a few measurements as well.
@laboshinl When I run "roslaunch loam_velodyne loam_velodyne.launch", there is an error as follow shows:

@DamonMIN As a debugging step, remove the call to Rviz inside the launch. Run the LOAM node separately and call rviz in another terminal. Then choose the laser_cloud_surround topic.
@laboshinl @TopGunSnake @CansenJIANG I have some test accuracy data and the algorithm is looking really good. I have less than 2% error in all the geometric calculations. There is a small problem though, a lot of the dynamic obstacles in the map such as a human walking around show up as artifacts in the map. Is there a way to reduce the "sensitivity" per say, in order to filter out point cloud data that are not static?
Hello,
I have just discovered LOAM, it seems very useful. I had a question if you don't mind. I have VLP-16 data that I collected a few months ago. They are in .bagfiles with the following topics:
topics: /cloud_in 1969 msgs : sensor_msgs/PointCloud2
/cloud_nodelet/parameter_descriptions 1 msg : dynamic_reconfigure/ConfigDescription
/cloud_nodelet/parameter_updates 1 msg : dynamic_reconfigure/Config
/diagnostics 197 msgs : diagnostic_msgs/DiagnosticArray
/rosout 19 msgs : rosgraph_msgs/Log (5 connections)
/rosout_agg 2 msgs : rosgraph_msgs/Log
/tf 2062 msgs : tf2_msgs/TFMessage
/velodyne_nodelet_manager/bond 828 msgs : bond/Status (3 connections)
/velodyne_packets 1969 msgs : velodyne_msgs/VelodyneScan
Is it possible to build a map with these topics? In other words without specifically having the topic 'velodyne_cloud_registered' ?
I have pulled out the pcd files already, can I build a map using those?
Thank you very much
@JohnMMeyer
I think you should remap your cloud_in topic to velodyne_points
http://wiki.ros.org/roslaunch/XML/remap
@laboshinl , thank you for the input. I did convert cloud_in to velodyne_points and that is playing nicely in RVIZ. My ultimate goal is to create a map and display it in Cloud Compare. I have been looking around and can't seem to find a way to do that with just the bagfile I have. Any help would be great.
@Durant35 I looked at the link you sent, thanks for that. Which paper specifically were you referencing/
Thanks for the help,
John
Hi. I just encountered the same problem as @CansenJIANG described before. Any idea about how to fix it?
Thanks
Does anyone know how these variables "arx, ary, arz" in Levenberg-MarQuardt come .
I think it maybe the elements of Jacobian matrix in LevenBerg-MarQuardt, but how is the Jacobian matrix computed? Can someone tell me? Thank you very much~! @laboshinl @haoala
Dear Leonid
I'm in trouble.
I downloaded sample PCAP file and ran it , as described below.
roslaunch velodyne_pointcloud VLP16_points.launch pcap:=pcapfilepath
At this time, i dumped to get the position in the time series of "/ integrated_to_init" topic (like this : rostopic echo -p /integrated_to_init > dump.txt).
but, i found that the TimeStamp does not match the TimeStamp of the original PCAP.
Why do not they match ?
Do you know the way to understand the relationship between each step of the "/ integrated_to_init" topic and the step of pcap?
Thanks!
Hey
I'm trying to build this package but I get an error saying
/usr/bin/ld: cannot find -lvtkCommon
/usr/bin/ld: cannot find -lvtkFiltering
/usr/bin/ld: cannot find -lvtkImaging
/usr/bin/ld: cannot find -lvtkGraphics
/usr/bin/ld: cannot find -lvtkGenericFiltering
/usr/bin/ld: cannot find -lvtkIO
/usr/bin/ld: cannot find -lvtkRendering
/usr/bin/ld: cannot find -lvtkVolumeRendering
/usr/bin/ld: cannot find -lvtkHybrid
/usr/bin/ld: cannot find -lvtkWidgets
/usr/bin/ld: cannot find -lvtkParallel
/usr/bin/ld: cannot find -lvtkInfovis
/usr/bin/ld: cannot find -lvtkGeovis
/usr/bin/ld: cannot find -lvtkViews
/usr/bin/ld: cannot find -lvtkCharts
Can you help me solve this error?
Thank you!
Hey
So I got it to work by manually building everything but I'm not getting a stitched pointcloud on /velodyne_cloud_registered. Instead it just seems to be playing back the pcap file I'm instantializing it with?
Thank you!
Hi,I am a student form SJTU,I'm going to using loam on hokuyo 3d laser.I'm wonder whether I can use your code directly?And whether it is influenced by HZ of the laser?Thank you very much~
@desmosedic @TopGunSnake when I write a function which rotates the incoming velodyne data so it fits the frame of reference of LOAM, it cuts off most of the data outside a specific FOV after running through scan registration. Could you guys explain how you got an output in the normal axis? Where do you apply the quaternion? Cheers
@CansenJIANG @desmosedic @TopGunSnake Hi, I have the same problem as you. When i open the point cloud in Cloud Compare it gives the circular output. Did you find any solution for that ? Please help
so could i run the program by feeding the real-time stream data from lidar.
cuz i find the program work by using two terminal which means readin data from lidar should be an option.
@SholtoD Are you just writing a tf to change coordinate frames? If so, there should not be any difference in the way the map looks.
@nikitaporje Not sure what circular output means..
I am wondering if anyone has tested with IMU. I am working on feeding in IMU data to LOAM, anybody know the IMU coordinate frames accepted by LOAM?
I am using hokuyo 3D lidar on loam rather than velodyne-16?Does anybody knows which kind of version I should use?Because I have problems on using the vlp-16 version?Thank you for your reply
@kobe4545 You would need to use the loam back and forth package in order to use the Hokuyo. You would also need a motor to spin the Hokuyo back and forth. Take a look at the webpage I linked for more information. Also, take a look at the LiDAR they use, not sure if they use a 2-D Hokuyo.
@desmosedic @laboshinl Well,thank you for your reply.But the problem is that I'm using the hokuyo 3d yvt lidar rahher than hokuyo 2d lidar,I think the loam back and forth fits for 2d lidar well.And the structure of data by 3d lidar is like this:


I am confuzed whether loam is suits for my lidar?
Hello People,
I have just discovered LOAM, it is great work and this what I was exactly looking for. I am using velodyne VLP-16 and HDL32E. My requirement is pointcloud registration and coloring (mapping RGB) in real time. I am trying to integrate monocular camera sensor with vlp-16 and stereo camera with hdl-32e. Right now I am post processing the data for point cloud coloring.
I have following queries:
- How to process LOAM in real time using both the Velodyne sensors?(If somebody has tried it in real time please do write me the steps and instructions)
- Has anyone integrated this LOAM along with camera sensor?
This would be really a great help. Many thanks in advance!
Best,
Sumit
Hi, I am a student in SYSU. I have run the project, but I have some problem. In the nsh_indoor_outdoor.bag,what I get is awful than the picture you give.
I want to know why the the nsh_indoor_outdoor.bag shows the result awfuller than what you give. Is this a normal phenomenon?
Thanks for help.
sysuzyc
@sumitjagdale Hey, I supposed you have to change const int N_SCANS = 16; to adequate number of your scans. 16 for VLP16 + 32 for VLP32. I have never tested it but I think your results depend on the position of the scanners.
Another way is to get 2 odometry from two LOAM nodes and put it in Kalman Filter to get one best result.
I am also interested in integration of this lidar LOAM with visual SLAM.
Best Regards,
Nickhodem
@Nickhodem Hi, Thanks a lot for your feedback. I aam going to try it soon and let you know if I can fix it! :)
@sysuzyc Have you tried this option: -r 0.5 if the result look bad and it is due to the less powerful CPU, (e.g. rosbag play nsh_indoor_outdoor.bag -r 0.5)
@sumitjagdale Thanks for your help. I use the method you give. And I find that the picture I get is better than before.
But I want to ask some question. Could you run the nsh_indoor_outdoor.bag and show the result like the picture the author displays. And I want to know whether we can use the code given to get the result like the picture or just the limitation of the CPU.
Thanks for help.
sysuzyc
@sysuzyc

Here is the result for outdoor dataset. It works!
@sumitjagdale Hey,
I am looking forward for your results. And if you find something useful for lidar+camera integration I hope you share your knowledge ;)
@sumitjagdale
Thank you very much. I will change a computer to launch the project.
@sumitjagdale
your result picture looks very beautiful, could you share the rviz config files? How to change the color like yours?
@sumitjagdale
Hi ,I have change a computer with the CPU 2.6GHz. But I can't get the picture you shows. What my result shows a white point cloud picture. It can't show the colorful picture like you gives. Is there something we should pay attention to(such as rviz,parameter)?
Thanks very much.
sysuzyc
@sysuzyc You should select suitable "Color transformer" value (ex: "Intensity") for your pointcloud2 topic in rviz
hi, I would like to ask you some understanding of the code, I do not understand why the first node code should be divided into five parts of the point cloud, there is the first part of the algorithm What is the point?@haoala @laboshinl
@laboshinl @sumitjagdale
Hi ,thanks for your helps first.
But I still have some question in the loam_slam result.
You can see that there is the discrete point cloud. But the result should be the continus point such as what you show. And the color transform value is Intensity too. There is no difference than before. So I want to know how the picture can be what you shows? And I have change a computer with a higher frequency CPU in 2.6GHz. So the device is just suitable for the project.
Thanks for your help.
Best wishes
sysuzyc.
Hey,
Does anyone have any notes explaining the code? This code doesn't contain any comments. I've compared the code with the paper, but I can't fully understand it. Any help will be appreciated.
@sysuzyc
Hello,
I have already sent email to Leonid Laboshin regarding this issue. I am also trying to register VLP16 point cloud in real time, but could not succeed yet.
Could you please text me your email id?
Thanks,
Sumit
@laboshinl @CansenJIANG
Has anyone already got working real-time point cloud registration for VLP16?
Please share the experience. I am stuck at getting the registered point cloud in real time.
Many thanks in advance. looking forward to getting kind help~
Best
Ada
@sumitjagdale
Hi,my email address is sysusmiezyc@gmail.com.
Thanks for your help.
sysuzyc
Hi
Someone can tell me how to output trajectory?
Thanks
@laboshinl @ZepherusFF
dear sir, is it the normal result shown as the belowing picture? I think it is too sparse. What's more,can you tell me where to save the final point map?

@DamonMIN
laser_cloud_surround contains filtered clouds velodyne_cloud_registered - unfiltered
rosrun pcl_ros pointcloud_to_pcd input:=/velodyne_cloud_registered saves .pcd for each registered pointcloud. Then this files should be simultaneously opened with ex. CloudCompare or pcl_viewer
Hello guys, I'm able to run the bag files with Loam project, but I can't play pcap files, I have already installed velodyne drivers and stuff, I get this error:
roslaunch velodyne_pointcloud VLP16_points.launch pcap:=~/catkin_ws/data.pcap
[FATAL] [1493398174.524589658]: Error opening Velodyne socket dump file.
[FATAL] [1493398174.931569284]: Failed to load nodelet '/velodyne_nodelet_manager_driverof typevelodyne_driver/DriverNodeletto managervelodyne_nodelet_manager'
[velodyne_nodelet_manager-2] process has died [pid 55859, exit code -11, cmd /opt/ros/indigo/lib/nodelet/nodelet manager __name:=velodyne_nodelet_manager __log:=/home/pelacho/.ros/log/a76b30e8-2c32-11e7-8c8f-000c29e7372c/velodyne_nodelet_manager-2.log].
log file: /home/pelacho/.ros/log/a76b30e8-2c32-11e7-8c8f-000c29e7372c/velodyne_nodelet_manager-2*.log
[velodyne_nodelet_manager_driver-3] process has died [pid 55866, exit code 255, cmd /opt/ros/indigo/lib/nodelet/nodelet load velodyne_driver/DriverNodelet velodyne_nodelet_manager __name:=velodyne_nodelet_manager_driver __log:=/home/pelacho/.ros/log/a76b30e8-2c32-11e7-8c8f-000c29e7372c/velodyne_nodelet_manager_driver-3.log].
log file: /home/pelacho/.ros/log/a76b30e8-2c32-11e7-8c8f-000c29e7372c/velodyne_nodelet_manager_driver-3*.log
Any help please
@kmotillo Hi, I have met this error several weeks ago. Do you use the datasets from the website ? I think this error is occured by the wrong pcap file. You gave get the pcap datasets in velodyne lidar with 16scans. This is the error I have met. Hope can help you.
sysuzyc
thanks @sysuzyc I already solved the problem: I was playing like this (pcap:=~/catkin_ws/data.pcap) and I read pcap files have to be played from the root like this: pcap:=/home/usuario/catkin_ws/data.pcap
How can I use LOAM with Velodyne64
Hallo,I'm using LOAM now,it's so great! I have modified code with "modified on linux" and "add velodyne HDL64E support" The procedure has compiled successfully. But when I execute launch there is only one node(transformMaintenance) live.The terminal displays as follows:
[laserOdometry-3] restarting process process[laserOdometry-3]: started with pid [14995] [laserOdometry-3] process has died [pid 14995, exit code -11, cmd /home/rmy/loam64/devel/lib/loam_velodyne/laserOdometry __name:=laserOdometry __log:=/home/rmy/.ros/log/038a2858-612a-11e7-b1f8-002324502a96/laserOdometry-3.log]. log file: /home/rmy/.ros/log/038a2858-612a-11e7-b1f8-002324502a96/laserOdometry-3*.log
I don't know why,can you help me? please
Is it possible to get a covariance of the odometry? or something that can give an idea of how accurate is LOAM being? I would like for example to integrate it with other odometry algorithms in a Kalman filter
Thanks a lot!!
Has anyone got LOAM working with a Velodyne HDL-32?
The code doesn't work out of the box for me, and instead crashes shortly after launch with this error:
[scanRegistration-2] process has died [pid 21648, exit code -11, cmd /home/matt/canis_repo/workspace/devel/lib/loam_velodyne/scanRegistration __name:=scanRegistration __log:=/home/matt/.ros/log/14654aa6-71b8-11e7-96ff-9cebe8291234/scanRegistration-2.log]. log file: /home/matt/.ros/log/14654aa6-71b8-11e7-96ff-9cebe8291234/scanRegistration-2*.log
I've been reading through the source and it seems that all the inputs, such as topic names, header_id's etc are hard-coded. For example the source code assumes your input point cloud is one the /velodyne_points topic and that your IMU data is on the /imu/data topic. Are there other requires like the names of reference frames that we should be aware of?
I'd use the sample rosbag to work it out, but unfortunately the link seems to be broken, because the file is missing on DropBox: broken link to sample VLP-16 rosbag
Hi mst22, you have to change N_SCANS in scanRegistration.cpp ;)
Hi ClementLeBihan, thanks for your help!
However, even after increasing N_SCANS to 32 from 16 (for my HDL-32) scanRegistration still crashes with the same error. Unfortunately, it also appears that scanRegistration crashes before writing anything to the log file, so I can't even find out what exactly causes the crash.
You can try the solution here : #10
Works great on Kinetic!
Has anyone got LOAM with other laser?
Recently,I have tried it with RS-lidar-16, the process can run for around 10s before the error:
[scanRegistration-2] process has died [pid 11181, exit code -11, cmd /home/sy/catkin_velodyne/devel/lib/loam_velodyne/scanRegistration /velodyne_points:=/rslidar_points __name:=scanRegistration __log:=/home/sy/.ros/log/316159b0-7780-11e7-b45e-3413e83ff6f6/scanRegistration-2.log].
log file: /home/sy/.ros/log/316159b0-7780-11e7-b45e-3413e83ff6f6/scanRegistration-2*.log
I can't find out what exactly causes the crash.
Any help please. Thank you!

Dear all,
Great work. I still have a question
I'm a newbie in ROS, I run both command lines
roslaunch loam_velodyne loam_velodyne.launch
then
roslaunch velodyne_pointcloud VLP16_points.launch pcap:="/media/borisleroux/DATA/ros_loam/270717_outdoor_test.pcap"
When the pcap is "finish", the viewer start again from the begining of the pcap, so I get wrong registered clouds.
How could I stop the program directly when all the packets from the pcap are registered ?
Thank you
Boris
Hi! @drscopus, did you really figure out how those jacobian components such as arx ary arz atx aty atz were computed ? as well as the bisquare weights herein.
Any help? @laboshinl @haoala